ar
스칼라 시계열에 대한 AR 모델 또는 ARI 모델 식별 시 파라미터 추정
구문
설명
sys = ar(y,n,___,Name,Value)'IntegrateNoise',1을 사용하여 ARI 모델을 추정할 수 있으며 이는 비정상 외란이 있는 시스템에 유용합니다. 위에 열거된 구문에 나와 있는 입력 인수를 원하는 대로 조합하고 그 뒤에 Name,Value를 지정하십시오.
예제
AR 모델을 추정하고 그 응답을 측정된 출력과 비교합니다.
잡음이 있는 시계열 tt9가 포함된 데이터를 불러옵니다.
load sdata9 tt9
4차 AR 모델을 추정합니다.
sys = ar(tt9,4)
sys =
Discrete-time AR model: A(z)y(t) = e(t)
A(z) = 1 - 0.8369 z^-1 - 0.4744 z^-2 - 0.06621 z^-3 + 0.4857 z^-4
Sample time: 0.0039062 seconds
Parameterization:
Polynomial orders: na=4
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using AR ('fb/now') on time domain data "tt9".
Fit to estimation data: 79.38%
FPE: 0.5189, MSE: 0.5108
Model Properties
출력에는 추정된 파라미터가 포함된 다항식이 다른 추정 세부 정보와 함께 표시됩니다. Status에서 Fit to estimation data는 추정된 모델의 향후 1-스텝 사전 예측의 정확도가 75%보다 높다는 것을 나타냅니다.
추정 결과에 대한 추가 정보는 추정 보고서 sys.Report를 살펴보면 찾을 수 있습니다. 예를 들어 파라미터 공분산을 가져올 수 있습니다.
covar = sys.Report.Parameters.FreeParCovariance
covar = 4×4
0.0015 -0.0015 -0.0005 0.0007
-0.0015 0.0027 -0.0008 -0.0004
-0.0005 -0.0008 0.0028 -0.0015
0.0007 -0.0004 -0.0015 0.0014
추정 보고서를 보는 것과 관련한 자세한 내용은 Estimation Report 항목을 참조하십시오.
잡음이 있는 정현파 신호가 있다고 가정하고 Burg 방법의 스펙트럼 추정값을 순방향-역방향 방식을 사용하여 구한 스펙트럼 추정값과 비교합니다.
출력 신호를 생성하고 iddata 객체로 변환합니다.
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
Burg 방법과 디폴트 순방향-역방향 방식을 사용하여 4차 AR 모델을 추정합니다. 모델 스펙트럼을 함께 플로팅합니다.
sys_b = ar(y,4,'burg'); sys_fb = ar(y,4); spectrum(sys_b,sys_fb) legend('Burg','Forward-Backward')
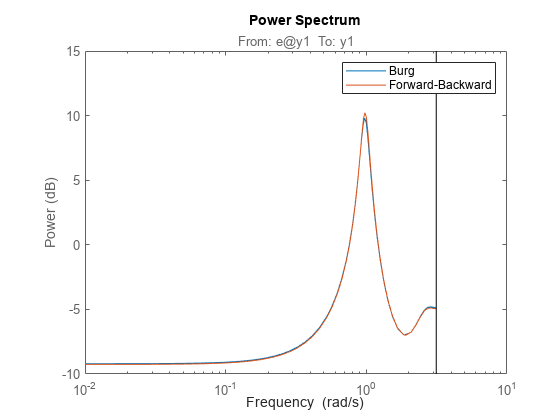
두 응답은 대부분의 주파수 범위에서 거의 일치합니다.
잡음원에 적분기를 포함하는 ARI 모델을 추정합니다.
잡음이 있는 시계열 ymat9가 포함된 데이터를 불러옵니다. Ts는 샘플 시간을 포함합니다.
load sdata9 ymat9 Ts
출력 신호를 적분합니다.
y = cumsum(ymat9);
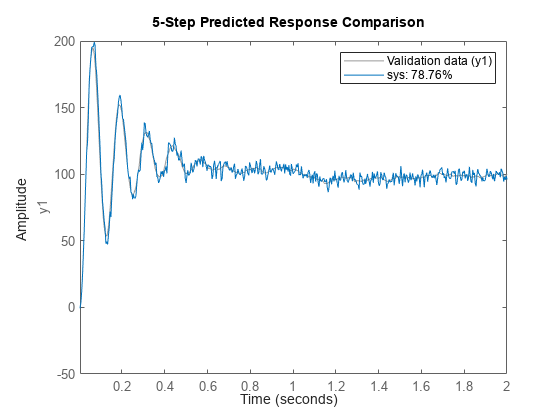
'IntegrateNoise'가 true로 설정된 AR 모델을 추정합니다. 최소제곱 방법 'ls'를 사용합니다.
sys = ar(y,4,'ls','Ts',Ts,'IntegrateNoise',true);
5-스텝 예측을 사용하여 모델 출력을 예측하고 결과를 적분된 출력 신호 y와 비교합니다.
compare(y,sys,5)
AR 함수에 대한 디폴트 옵션을 수정합니다.
잡음이 있는 시계열 z9가 포함된 데이터를 불러옵니다.
load iddata9 z9
함수가 'ls' 방식을 사용하고 공분산을 추정하지 않도록 디폴트 옵션을 수정합니다.
opt = arOptions('Approach','ls','EstimateCovariance',false)
opt =
Option set for the ar command:
Approach: 'ls'
Window: 'now'
DataOffset: 0
EstimateCovariance: 0
MaxSize: 250000
Description of options
업데이트된 옵션을 사용하여 4차 AR 모델을 추정합니다.
sys = ar(z9,4,opt);
Burg 방법을 사용할 때 반사 계수와 손실 함수를 가져옵니다.
Burg 방법 'burg', 기하 격자 'gl'과 같은 격자 기반 방식은 추정 프로세스에서 반사 계수 및 대응하는 손실 함수 값을 계산합니다. 두 번째 출력 인수를 사용하여 이러한 값을 가져옵니다.
출력 신호를 생성하고 iddata 객체로 변환합니다.
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
Burg 방법을 사용하여 4차 AR 모델을 추정하고 반사 계수에 대한 출력 인수를 포함합니다.
[sys,refl] = ar(y,4,'burg');
reflrefl = 2×5
0 -0.3562 0.4430 0.5528 0.2385
0.8494 0.7416 0.5960 0.4139 0.3904
입력 인수
이름-값 인수
출력 인수
세부 정보
알고리즘
AR 모델 파라미터와 ARI 모델 파라미터는 변형된 최소제곱 방법을 사용하여 추정됩니다. 다음 표에는 approach 인수 값과 window 인수 값의 특정 조합을 사용하는 \방법의 일반적인 이름이 요약되어 있습니다.
| 방법 | 방식 및 윈도우 적용 |
|---|---|
| 수정 공분산 방법 | (디폴트 값) 윈도우를 적용하지 않는 순방향-역방향 방식 |
| 상관 방법 | 윈도우 사전 적용 및 윈도우 사후 적용을 사용한 Yule-Walker 방식 |
| 공분산 방법 | 윈도우를 적용하지 않는 최소제곱 방식. arx는 이 루틴을 사용합니다. |
참고 문헌
[1] Marple, S. L., Jr. Chapter 8. Digital Spectral Analysis with Applications. Englewood Cliffs, NJ: Prentice Hall, 1987.