plot
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
plot( plots trajectories in the
input trajectory)Trajectory
object trajectory.
plot(
specifies options using one or more name-value arguments. For example,
trajectory,Name=Value)MarkerSize=5 plots the GPS waypoints with a marker size of 5.
figHandle = plot(___)Figure object using any combination of input arguments
from previous syntaxes.
Examples
Load recorded GPS trajectory data into the workspace.
load("recordedGPSData.mat","X","Y","Z","timestamps")
Create a trajectory object by using the loaded timestamps and xyz-coordinates.
traj1 = scenariobuilder.Trajectory(timestamps,X,Y,Z)
traj1 =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
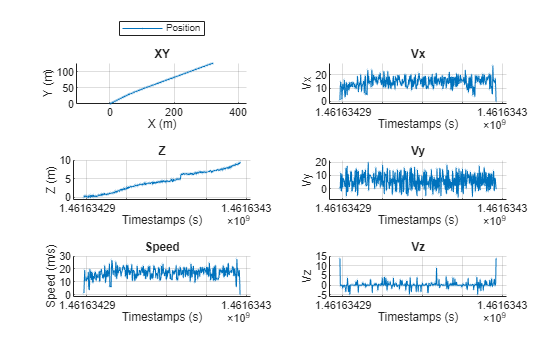
Plot the trajectory object.
plot(traj1,ShowZ=true,ShowSpeed=true,ShowVelocity=true,LineWidth=0.1,MarkerSize=1)
Combine the xyz-coordinates into a waypoint matrix, and create another trajectory by using the timestamps and waypoints.
waypoints = [X Y Z]; traj2 = scenariobuilder.Trajectory(timestamps,waypoints)
traj2 =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
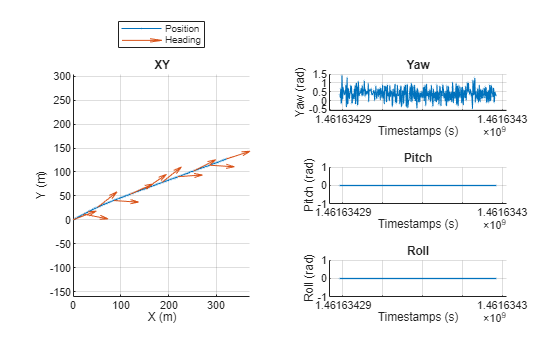
Plot the trajectory object.
plot(traj2,ShowHeading=true,ShowOrientation=true,LineWidth=0.1,MarkerSize=1)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2024b
See Also
GPSData | Trajectory | CameraData | LidarData | recordedSensorData