getCurvedGridPointCloud
Extract curved regular grid of road surface data as point cloud object
Since R2025b
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
Examples
Load point cloud data and a road reference line into the workspace.
Note: The point cloud data must contain the road information for the specified road reference line.
data = load("roadSurfaceData.mat","ptCld","roadRefLine"); ptCld = data.ptCld; roadRefLine = data.roadRefLine;
Specify the width of the road from the reference line as 4 meters on the left and 3 meters on the right.
roadWidthFromRefLine = [4 3];
Specify the resolution of the road surface as 1 cm each in the longitudinal and lateral directions.
gridResolution = [0.01 0.01];
Create a road surface object.
rsObj = roadSurface(ptCld,roadRefLine,roadWidthFromRefLine,gridResolution)
rsObj =
roadSurface with properties:
RoadReferenceLine: [6×2 double]
LateralResolution: 0.0100
LongitudinalResolution: 0.0100
RoadWidthFromRefLine: [4 3]
InterpolationMethod: "nearest"
ExtrapolationMethod: "nearest"
LocalOrigin: []
HasNormalizedElevation: 1
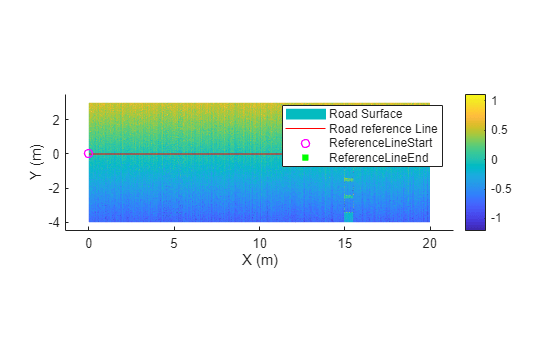
Visualize the road surface.
show(rsObj)
Create a point cloud object from the road surface data.
crgPtCld = getCurvedGridPointCloud(rsObj)
crgPtCld =
pointCloud with properties:
Location: [2001×701×3 single]
Count: 1402701
XLimits: [0 20]
YLimits: [-4 3]
ZLimits: [-1.1488 1.1247]
Color: []
Normal: []
Intensity: []
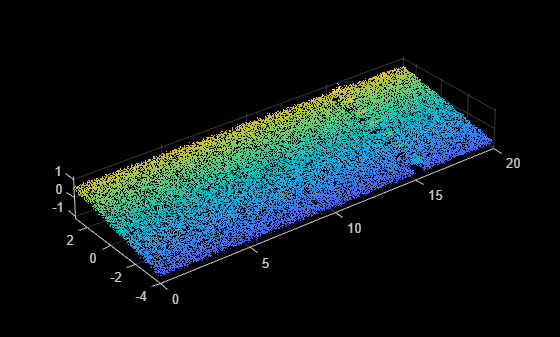
Plot the point cloud object.
pcshow(crgPtCld)
Input Arguments
Output Arguments
Tips
To create an OpenCRG mesh from the returned point cloud object, use the
pc2surfacemesh(Lidar Toolbox) function.
Version History
Introduced in R2025b