detect
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
Detect Lane Boundaries in Image Coordinate System
lanePoints = detect(detector,I)I, using a
laneBoundaryDetector object, detector. The function
returns the lane boundary points detected in the input image as a set of pixel
coordinates, lanePoints.
lanePoints = detect(detector,camData)camData.
lanePoints
= detect(detector,batch)batch.
lanePoints
= detect(detector,imds)ImageDatastore
object imds.
lanePoints
= detect(___,Name=Value)DetectionThreshold="0.2" sets the lane detection
score threshold to 0.2.
[
additionally returns confidence scores, lanePoints,scores] = detect(___)scores, for detected lanes in
images.
Detect Lane Boundaries in Vehicle Coordinate System
[
detects and returns the lane boundary points lanePointsVehicle,laneBoundaries]
= detect(detector,I,sensor)lanePointsVehicle in the
vehicle coordinate system by using the monoCamera object
sensor. This object function also returns lane boundaries,
laneBoundaries.
[
detects lane boundary points for images in a camera data object,
lanePointsVehicle,laneBoundaries]
= detect(detector,camData,sensor)camData.
[
detects lane boundary points for the batch of images lanePointsVehicle,laneBoundaries]
= detect(detector,batch,sensor)batch.
[
detects lane boundary points for a series of images associated with an
lanePointsVehicle,laneBoundaries]
= detect(detector,imds,sensor)ImageDatastore object, imds.
[
specifies options using one or more name-value arguments in addition to any combination of
arguments from the previous three syntaxes. For example,
lanePointsVehicle,laneBoundaries] = detect(___,Name=Value)ExecutionEnvironment="cpu" uses the hardware resource as CPU to
execute the function.
Note: This feature also requires the Deep Learning Toolbox™ and the Deep Learning Toolbox Converter for ONNX™ Model Format support package. You can install the Deep Learning Toolbox Converter for ONNX Model Format support packages from the Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
Examples
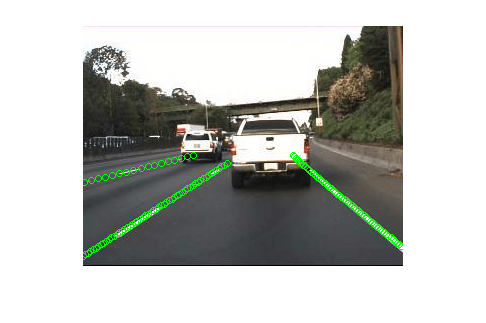
Detect lane boundary points in an RGB image by using the laneBoundaryDetector object.
Read an image into the workspace.
I = imread("highway.png");Initialize the laneBoundaryDetector object with CLRNet model.
detector = laneBoundaryDetector;
Detect the boundary points of the lanes in the image by using the detect object function of the laneBoundaryDetector object.
lanes = detect(detector,I,ROI=120,ExecutionEnvironment="cpu");Insert the detected lane boundary points into the image, as markers, by using the insertMarker function.
for i = 1:size(lanes{1},2) if ~isempty(lanes{1}{i}) I = insertMarker(I,lanes{1}{1,i},"o",Size=3); end end
Display the image, annotated with the detected lane boundary points.
imshow(I)
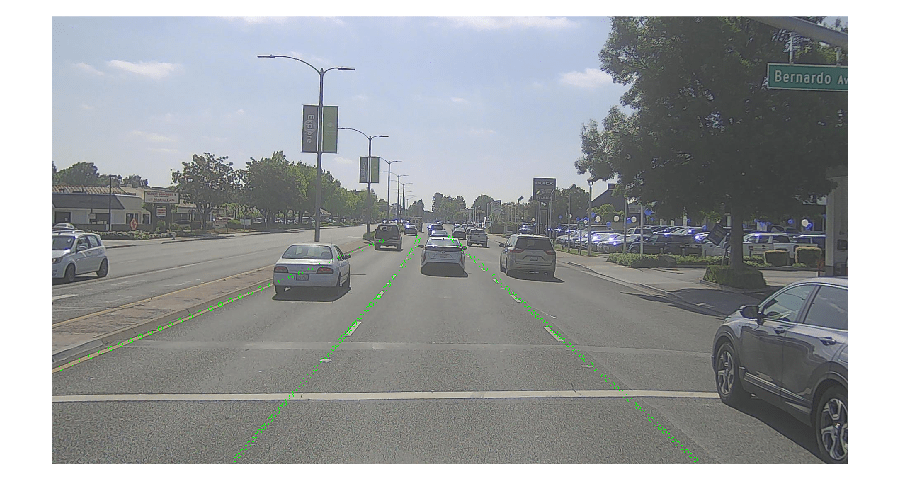
Detect lane boundaries in an RGB image by using the laneBoundaryDetector object and camera sensor parameters.
Note: You must have relevant camera parameters for the sensor on which your RGB image is captured.
Read an image from the PandaSet data set into the workspace.
I = imread("PandaSetImage.jpg");Specify your camera sensor parameter as a monoCamera object.
focalLength = [1970.0131 1970.0091]; % Units are in pixels principalPoint = [970.0002 483.2988]; % Units are in pixels imageSize = [1080 1920]; % Units are in pixels intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); height = 1.8; sensorloc = [0 0]; PandaSetMonoCam = monoCamera(intrinsics,height,SensorLocation=sensorloc);
Initialize the laneBoundaryDetector object.
detector = laneBoundaryDetector;
Crop the image by removing top 400 rows from the image, and performs lane boundary detection in the image by using the detect object function of the laneBoundaryDetector object.
[lanePointsVehicle,laneBoundaries] = detect(detector,I,PandaSetMonoCam,ROI=400,ExecutionEnvironment="cpu");Convert vehicle coordinates to image coordinates by using the vehicleToImage function. Insert the detected lane boundary points into the image, as markers, by using the insertMarker function.
for i = 1:size(lanePointsVehicle{1},2) if ~isempty(lanePointsVehicle{1}{i}) lanePointsImage = vehicleToImage(PandaSetMonoCam,lanePointsVehicle{1}{1,i}); I = insertMarker(I,lanePointsImage,"circle",Size=5); end end
Display the input image, annotated with the detected lane boundary points.
imshow(I)
Display the extracted lane boundaries.
bep = birdsEyePlot(XLim=[0 30],YLim=[-20 20]);
lbPlotter = laneBoundaryPlotter(bep,DisplayName="Lane boundaries");
plotLaneBoundary(lbPlotter,laneBoundaries{1})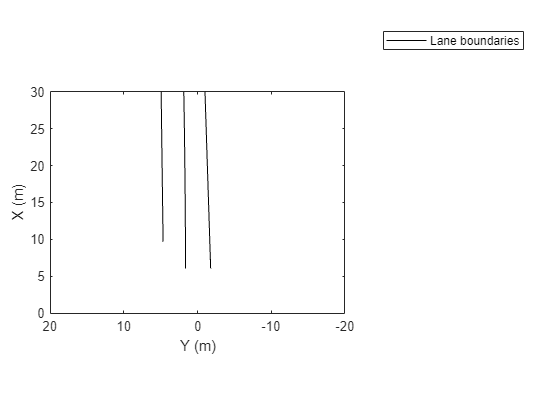
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Hesai and Scale. PandaSet. Accessed September 18, 2025. https://pandaset.org/. The PandaSet data set is provided under the CC-BY-4.0 license.