궤적 추종을 위한 로봇 팔 제어기 설계
해당 시리즈: 자율 로봇 시스템 개발을 위한 MATLAB 및 Simulink: 아이디어를 현실로
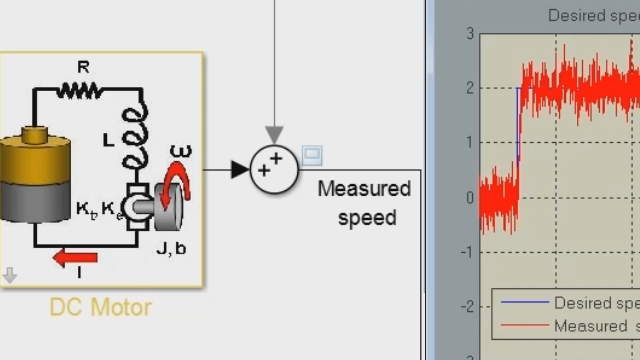
본 세션에서는 계획된 궤적을 추종하는 제어기를 설계하는 방법에 대해 다룹니다. 제어기는 크게 액츄에이터 제어를 위한 low-level의 간단한 PID제어기부터 로봇 모션 제어를 위한 high-level 제어기로 나누어, low-level 제어기는 기존의 trial & error를 통한 튜닝이 아닌 자동 튜닝 기법을 이용해 시스템에 최적화된 게인 튜닝을 하는 방법을 소개합니다. 모션 제어의 경우에는 예제를 통해 state machine, model predictive control을 통해 제어 로직 설계 및 충돌 회피 가능한 최적 궤적 제어기 설계를 하는 방법을 소개해드립니다. 마지막으로는 AI알고리즘 기반의 강화학습 제어기로 로봇 팔 어플리케이션을 개발하는 방법도 소개합니다.
- 액츄에이터 제어를 위한 PID 제어기 설계
- Stateflow®를 이용한 모션 제어기
- Nonlinear MPC를 이용한 충돌 회피 가능한 최적 궤적 제어 설계
- AI 기반의 강화학습 제어기 설계
발행: 2021년 3월 4일