모터 및 서보에 액추에이터 값 쓰기
모터 전자식 속도 제어기 및 서보에 액추에이터 값을 쓰는 방법 알아보기
PWM 또는 UAVCAN/DroneCAN 인터페이스를 통해 연결된 모터 ESC(전자식 속도 제어기)와 서보에 액추에이터 값을 쓰는 방법을 알아봅니다.
블록
| PX4 Actuator Write | Set actuator values for motors and servos (R2024b 이후) |
| PX4 Write Thrust & Torque Setpoint | Publish the thrust and torque setpoints to uORB topics (R2025a 이후) |
| PX4 PWM Output | Configure PWM outputs for servo motors and ESC control |
도움말 항목
- Convert PX4 PWM Output Block to PX4 Actuator Write Block
Converting PWM blocks to PX4 Actuator Write block in a Simulink® model.
- Configure and Assign Actuators in QGC
Configure PWM & AUX pins in QGC.
- Generate PWM Signals with PX4 PWM Output Block
Use the UAV Toolbox Support Package for PX4® Autopilots to generate PWM signal from a PX4 autopilot in Simulink.
추천 예제

Actuator Control Using Write Thrust & Torque Blocks for PX4 Autopilots
Use the PX4 Write Thrust & Torque block to command the actuators.
Getting Started with Actuator Control over PWM
Use the PX4 Actuator Write block to write actuator values over PWM.
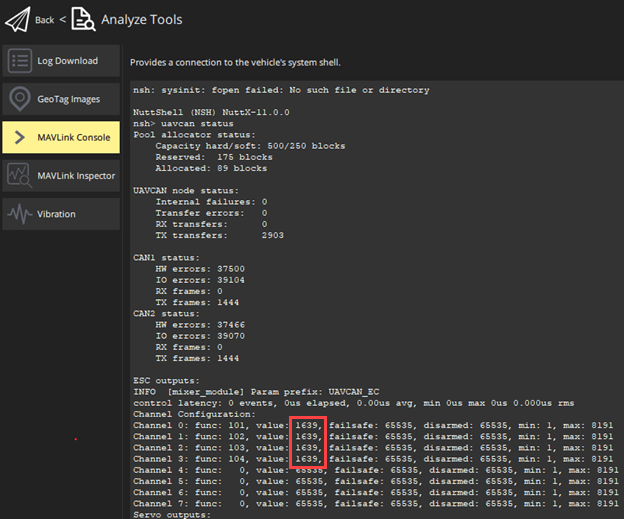
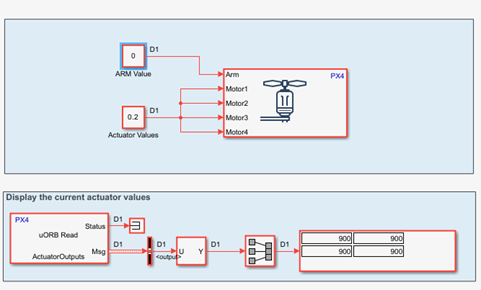
Getting Started with Actuator Control over UAVCAN/DroneCAN
Use the PX4 Actuator Write block to write actuator values over UAVCAN/DroneCAN interface.