Orbit Follower
Orbit location of interest using UAV
Libraries:
UAV Toolbox /
Algorithms
Description
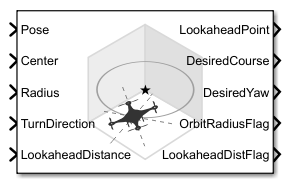
The Orbit Follower block generates course and yaw controls for following a circular orbit around a location of interest based on the current pose of the unmanned aerial vehicle (UAV). Select a UAV type of fixed-wing or multirotor UAVs. You can specify any orbit center location, orbit radius, and turn direction. A lookahead distance, LookaheadDistance, is used for tuning the path tracking and generating the LookaheadPoint output.
Examples
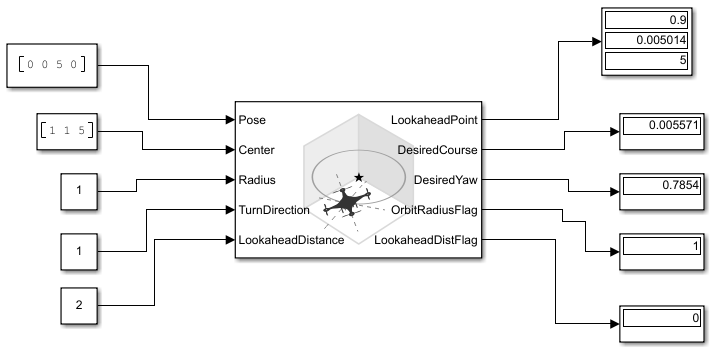
Generate Course and Yaw Commands for Orbit Following in Simulink
Use the UAV Orbit Follower block to generate course and yaw commands for orbiting a location of interest with a UAV.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2019a