이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
데이터 처리 및 시각화
좌표 프레임 변환, 궤적 생성, 포인트 클라우드와 변환 시각화
데이터 처리 함수와 시각화 함수를 서로 다른 좌표계 간 변환, 웨이포인트에서 궤적 생성 또는 포인트 클라우드나 UAV 자세 같은 데이터를 시각화하는 유틸리티 함수로 사용합니다.
함수
블록
| Coordinate Transformation Conversion | 지정된 좌표 변환 표현으로 변환 |
도움말 항목
- Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation
This example shows how to visualize depth and semantic segmentation data captured from a camera sensor in a simulation environment.
- Map and Classify Urban Environment Using UAV Camera and Deep Learning
Use a UAV with a camera to survey and develop an orthomosaic of an urban environment.
추천 예제
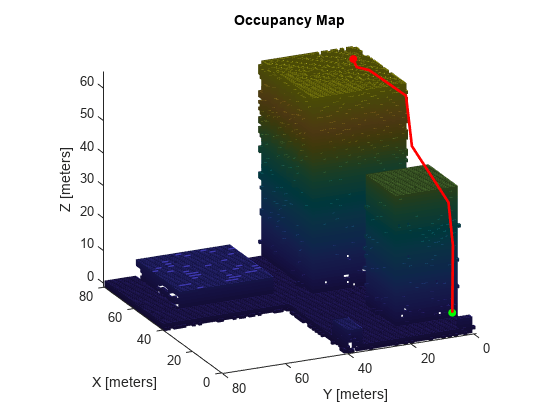
Map Environment for Motion Planning Using UAV Lidar
Use a UAV with lidar sensor to create a 3D occupancy map for motion planning.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Generate a map for a city block scene in an Unreal Engine environment using stereo visual simultaneous localization and mapping.