functionalDerivative
범함수(functional)의 도함수(변분 도함수)
설명
예제
함수 에 대해 범함수 의 도함수를 구합니다. 여기서 피적분 함수는 입니다.
y(x)를 기호 함수로 선언하고 f를 의 피적분 함수로 정의합니다. f와 y를 functionalDerivative의 파라미터로 사용합니다.
syms y(x)
f = y*sin(y);
G = functionalDerivative(f,y)G(x) =
함수 와 에 대해 범함수 의 도함수를 구합니다. 여기서 피적분 함수는 입니다.
u(x)와 v(x)를 기호 함수로 선언하고 f를 의 피적분 함수로 정의합니다.
syms u(x) v(x) f = u^2*diff(v,x) + v*diff(u,x,x);
기호 함수로 구성된 벡터 [u v]를 functionalDerivative의 두 번째 입력 인수로 지정합니다.
G = functionalDerivative(f,[u v])
G(x) =
functionalDerivative는 u와 v에 대해 각각 피적분 함수 f의 범함수의 도함수를 포함하는 기호 함수로 구성된 벡터를 반환합니다.
스프링 상수가 k인 스프링에 연결된 질량 m의 오일러-라그랑주 방정식을 구합니다.
시스템의 운동 에너지 T, 위치 에너지 V, 라그랑주 L을 정의합니다. 라그랑주는 운동 에너지와 위치 에너지 간의 차입니다.
syms m k x(t) T = 1/2*m*diff(x,t)^2; V = 1/2*k*x^2; L = T - V
L(t) =
라그랑주 역학에서 시스템의 작용 범함수는 시간에 따른 랑그랑주의 적분, 즉 와 같습니다. 오일러-라그랑주 방정식은 가 정상(stationary)인 시스템의 운동을 설명합니다.
피적분 함수 L의 범함수의 도함수를 계산하고 이를 0으로 설정하여 오일러-라그랑주 방정식을 구합니다.
eqn = functionalDerivative(L,x) == 0
eqn(t) =
eqn은 질량-스프링 진동을 설명하는 미분 방정식입니다.
dsolve를 사용하여 eqn을 풉니다. 질량 m과 스프링 상수 k가 양수라고 가정합니다. 진동 진폭의 초기 조건을 으로 설정하고 질량의 초기 속도를 으로 설정합니다.
assume(m,'positive') assume(k,'positive') Dx(t) = diff(x(t),t); xSol = dsolve(eqn,[x(0) == 10, Dx(0) == 0])
xSol =
추후 계산을 위해 가정을 지웁니다.
assume([k m],'clear')최속 강하선 문제는 마찰 없이 중력이 작용하는 상태에서 입자의 가장 빠른 하강 경로를 찾는 것입니다. 운동은 수직 평면으로 국한됩니다. 중력 가 작용할 때 물체가 점 에서 점 로 곡선 를 따라 이동하는 시간은 다음과 같이 계산됩니다.
경로 의 작은 변분에 대해 의 변동을 최소화하여 가장 빠른 경로를 구합니다. 최솟값에 대한 조건은 입니다.
최속 강하선 문제를 설명하는 미분 방정식을 구하기 위해 범함수의 도함수를 계산합니다. simplify를 사용하여 방정식을 원하는 형식으로 단순화합니다.
syms g y(x) assume(g,'positive') f = sqrt((1 + diff(y)^2)/(2*g*y)); eqn = functionalDerivative(f,y) == 0; eqn = simplify(eqn)
eqn(x) =
이 방정식은 최속 강하선 문제의 표준 미분 방정식입니다. 미분 방정식의 해를 구하려면 dsolve를 사용하십시오. 'Implicit' 옵션을 true로 지정하여 형식을 갖는 음함수 해를 반환합니다.
sols = dsolve(eqn,'Implicit',true)sols =
기호 솔버 dsolve는 복소 공간의 일반해를 반환합니다. Symbolic Math Toolbox™는 기호 함수 가 실수라는 가정을 허용하지 않습니다.
경계 조건에 따라, 최속 강하선 문제에 대해 두 가지 실수 공간 해가 있습니다. 이 두 가지 해 중 하나(아래)는 실수 공간의 사이클로이드 곡선을 설명합니다.
solCycloid1 = sols(3)
solCycloid1 =
solCycloid2 = sols(5)
solCycloid2 =
실수 공간에서의 다른 해는 가로 직선입니다. 여기서 는 상수입니다.
solStraight = simplify(sols(4))
solStraight =
사이클로이드 해를 설명하기 위해 경계 조건 와 을 갖는 예를 고려해 볼 수 있습니다. 이 경우, 주어진 경계 조건을 충족할 수 있는 방정식은 solCycloid1입니다. 두 경계 조건을 solCycloid1에 대입합니다.
eq1 = subs(solCycloid1,[x y(x)],[0 5]); eq2 = subs(solCycloid1,[x y(x)],[4 1]);
두 방정식 eq1과 eq2는 미지의 두 계수 과 을 갖습니다. vpasolve를 사용하여 이 계수에 대한 수치 해를 구합니다. 이렇게 구한 해를 solCycloid1에 대입합니다.
coeffs = vpasolve([eq1 eq2]);
eqCycloid = subs(solCycloid1,{'C1','C3'},{coeffs.C1,coeffs.C3})eqCycloid =
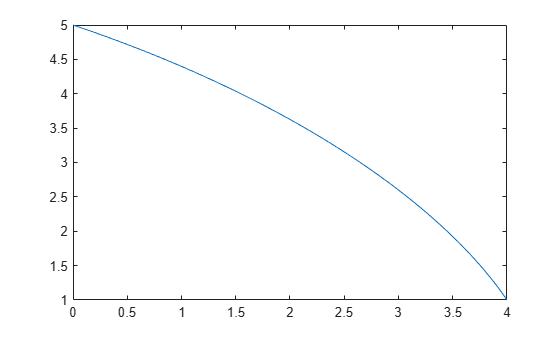
음함수 방정식 eqCycloid는 와 에 대한 최속 강하선 문제의 사이클로이드 해를 설명합니다.
이제 fimplicit를 사용하여 eqCycloid를 플로팅할 수 있습니다. fimplicit는 기호 변수 와 를 포함하는 음함수 기호 방정식만 허용하므로, 기호 함수 를 기호 변수 로 변환합니다. mapSymType을 사용하여 를 로 변환합니다. 경계 조건 및 내에서 사이클로이드 해를 플로팅합니다.
funToVar = @(obj) sym('y'); eqPlot = mapSymType(eqCycloid,'symfun',funToVar); fimplicit(eqPlot,[0 4 1 5])
3차원 공간의 곡면을 설명하는 함수 의 경우, 곡면 면적은 다음 범함수에 의해 결정될 수 있습니다.
여기서 와 는 와 에 대한 의 편도함수입니다.
u에 대해 피적분 함수 f의 범함수의 도함수를 구합니다.
syms u(x,y)
f = sqrt(1 + diff(u,x)^2 + diff(u,y)^2);
G = functionalDerivative(f,u)G(x, y) =
결과는 u(x,y)로 정의된 3차원 곡면의 극소 곡면을 설명하는 방정식 G입니다. 이 방정식의 해는 비눗방울과 같은 3차원 공간의 극소 곡면을 설명합니다.
입력 인수
출력 인수
세부 정보
버전 내역
R2015a에 개발됨