이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
2링크 로봇 팔의 역기구학 유도 및 적용
이 예제에서는 MATLAB®과 Symbolic Math Toolbox™를 사용하여 2링크 로봇 팔의 역기구학을 유도하고 적용합니다.
이 예제에서는 조인트 파라미터와 엔드 이펙터 위치를 기호적으로 정의하고, 정기구학과 역기구학의 해를 계산하여 시각화하고, 로봇 팔의 운동을 시뮬레이션하는 데 유용한 시스템 야코비 행렬을 구합니다.
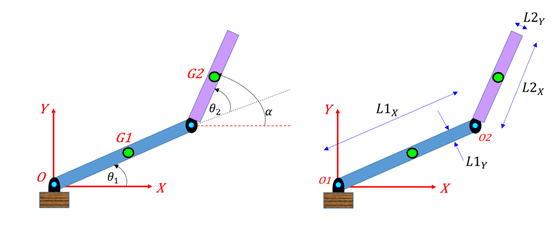
1단계: 기하 파라미터 정의하기
로봇의 링크 길이, 조인트 각도, 엔드 이펙터 위치를 기호 변수로 정의합니다.
syms L_1 L_2 theta_1 theta_2 XE YE
로봇의 링크 길이에 대한 값을 지정합니다.
L1 = 1; L2 = 0.5;
2단계: 엔드 이펙터의 X 및 Y 좌표 정의하기

엔드 이펙터의 X 및 Y 좌표를 조인트 각도 의 함수로 정의합니다.
XE_RHS = L_1*cos(theta_1) + L_2*cos(theta_1+theta_2)
XE_RHS =
YE_RHS = L_1*sin(theta_1) + L_2*sin(theta_1+theta_2)
YE_RHS =
기호 표현식을 MATLAB 함수로 변환합니다.
XE_MLF = matlabFunction(XE_RHS,Vars=[L_1 L_2 theta_1 theta_2]); YE_MLF = matlabFunction(YE_RHS,Vars=[L_1 L_2 theta_1 theta_2]);
3단계: 정기구학 계산 및 시각화하기
정기구학은 조인트 각도를 엔드 이펙터 위치로 변환합니다(). 주어진 특정 조인트 각도 값에 대해 정기구학을 사용하여 엔드 이펙터 위치를 계산합니다.
조인트 각도의 입력값을 및 로 지정합니다.
t1_degs_row = linspace(0,90,100); t2_degs_row = linspace(-180,180,100); [tt1_degs,tt2_degs] = meshgrid(t1_degs_row,t2_degs_row);
각도 단위를 도에서 라디안으로 변환합니다.
tt1_rads = deg2rad(tt1_degs); tt2_rads = deg2rad(tt2_degs);
MATLAB 함수 XE_MLF 및 YE_MLF를 각각 사용하여 X 및 Y 좌표를 계산합니다.
X_mat = XE_MLF(L1,L2,tt1_rads,tt2_rads); Y_mat = YE_MLF(L1,L2,tt1_rads,tt2_rads);
헬퍼 함수 plot_XY_given_theta_2dof를 사용하여 X 및 Y 좌표를 시각화합니다.
plot_XY_given_theta_2dof(tt1_degs,tt2_degs,X_mat,Y_mat,(L1+L2))

4단계: 역기구학 구하기
역기구학은 엔드 이펙터 위치를 조인트 각도로 변환합니다(). 정기구학 방정식에서 역기구학을 구합니다.
정기구학 방정식을 정의합니다.
XE_EQ = XE == XE_RHS; YE_EQ = YE == YE_RHS;
및 에 대해 방정식을 풉니다.
S = solve([XE_EQ YE_EQ],[theta_1 theta_2])
S = struct with fields:
theta_1: [2×1 sym]
theta_2: [2×1 sym]
구조체 S는 및 에 대한 복수의 해를 표현합니다. 에 대한 한 쌍의 해를 표시합니다.
simplify(S.theta_1)
ans =
에 대한 한 쌍의 해를 표시합니다.
simplify(S.theta_2)
ans =
나중에 사용할 수 있도록 해를 MATLAB 함수로 변환합니다. 함수 TH1_MLF 및 TH2_MLF는 역기구학을 표현합니다.
TH1_MLF{1} = matlabFunction(S.theta_1(1),Vars=[L_1 L_2 XE YE]);
TH1_MLF{2} = matlabFunction(S.theta_1(2),Vars=[L_1 L_2 XE YE]);
TH2_MLF{1} = matlabFunction(S.theta_2(1),Vars=[L_1 L_2 XE YE]);
TH2_MLF{2} = matlabFunction(S.theta_2(2),Vars=[L_1 L_2 XE YE]);5단계: 역기구학 계산 및 시각화하기
역기구학을 사용하여 X 및 Y 좌표에서 과 를 계산합니다.
X 및 Y 좌표의 그리드 점을 정의합니다.
[xmat,ymat] = meshgrid(0:0.01:1.5,0:0.01:1.5);
MATLAB 함수 TH1_MLF{1} 및 TH2_MLF{1}을 각각 사용하여 각도 과 를 계산합니다.
tmp_th1_mat = TH1_MLF{1}(L1,L2,xmat,ymat);
tmp_th2_mat = TH2_MLF{1}(L1,L2,xmat,ymat);각도 단위를 라디안에서 도로 변환합니다.
tmp_th1_mat = rad2deg(tmp_th1_mat); tmp_th2_mat = rad2deg(tmp_th2_mat);
(X,Y) = (1.5,1.5)와 같은 일부 입력 좌표는 엔드 이펙터의 도달 가능 작업 공간을 벗어납니다. 역기구학 해는 보정이 필요한 허수 세타 값을 생성할 수 있습니다. 허수 세타 값을 보정하십시오.
th1_mat = NaN(size(tmp_th1_mat)); th2_mat = NaN(size(tmp_th2_mat)); tf_mat = imag(tmp_th1_mat) == 0; th1_mat(tf_mat) = real(tmp_th1_mat(tf_mat)); tf_mat = imag(tmp_th2_mat) == 0; th2_mat(tf_mat) = real(tmp_th2_mat(tf_mat));
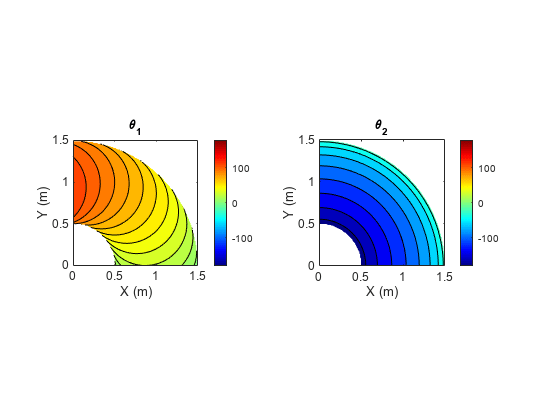
헬퍼 함수 plot_theta_given_XY_2dof를 사용하여 각도 및 를 시각화합니다.
plot_theta_given_XY_2dof(xmat,ymat,th1_mat,th2_mat)
6단계: 시스템 야코비 행렬 계산하기
시스템 야코비 행렬은 다음과 같이 정의합니다.
the_J = jacobian([XE_RHS YE_RHS],[theta_1 theta_2])
the_J =
시스템 야코비 행렬 와 해당 무어-펜로즈 의사 역행렬 를 사용하여 조인트 속도를 엔드 이펙터 속도에 연결하고 그 반대로 연결할 수도 있습니다.
야코비 행렬의 기호 표현식을 MATLAB 함수 블록으로 변환할 수도 있습니다. 복수의 중간점을 Simulink® 모델의 입력으로 정의하여 궤적에서 로봇의 엔드 이펙터 위치를 시뮬레이션하십시오. Simulink 모델은 조인트 각도 값을 기반으로 궤적의 각 중간점에 도달하기 위한 모션 프로파일을 계산할 수 있습니다. 자세한 내용은 Inverse Kinematics of a 2-link Robot Arm 및 Teaching Rigid Body Dynamics 항목을 참조하십시오.
헬퍼 함수
function plot_theta_given_XY_2dof(X_mat,Y_mat,theta_1_mat_degs,... theta_2_mat_degs) xlab_str = "X (m)"; ylab_str = "Y (m)"; figure; hax(1) = subplot(1,2,1); contourf(X_mat,Y_mat,theta_1_mat_degs); clim(hax(1),[-180 180]); colormap(gca,"jet"); colorbar xlabel(xlab_str,Interpreter="tex"); ylabel(ylab_str,Interpreter="tex"); title(hax(1),"\theta_1",Interpreter="tex") axis("equal") hax(2) = subplot(1,2,2); contourf(X_mat,Y_mat,theta_2_mat_degs); clim(hax(2),[-180 180]); colormap(gca,"jet"); colorbar xlabel(xlab_str,Interpreter="tex"); ylabel(ylab_str,Interpreter="tex"); title(hax(2),"\theta_2",Interpreter="tex") axis("equal") end function plot_XY_given_theta_2dof(theta_1_mat_degs,theta_2_mat_degs,... X_mat,Y_mat,a_cmax) xlab_str = "\theta_1 (degs)"; ylab_str = "\theta_2 (degs)"; figure; hax(1) = subplot(1,2,1); contourf(theta_1_mat_degs,theta_2_mat_degs,X_mat); clim(hax(1),[0 a_cmax]); colormap(gca,"jet"); colorbar xlabel(xlab_str,Interpreter="tex"); ylabel(ylab_str,Interpreter="tex"); title(hax(1),"X_E",Interpreter="tex") hax(2) = subplot(1,2,2); contourf(theta_1_mat_degs,theta_2_mat_degs,Y_mat); clim(hax(1),[0 a_cmax]); colormap(gca,"jet"); colorbar xlabel(xlab_str,Interpreter="tex"); ylabel(ylab_str,Interpreter="tex"); title(hax(2),"Y_E",Interpreter="tex") end
참고 항목
함수
matlabFunction|solve|simplify|jacobian