이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
식별된 플랜트 구조 선택하기
PID 조정기에서는 플랜트 동특성을 두 가지 유형의 모델 구조, 즉 공정 모델 구조와 상태공간 모델 구조로 나타낼 수 있습니다.
시스템의 특성에 대해 알고 있는 지식과 응용 분야에서 요구되는 정확도 수준을 바탕으로 모델 구조를 선택하십시오. 사전 정보가 없는 경우에는 실험을 통해 획득한 시스템의 계단 응답 및 주파수 응답을 분석하여 동특성의 차수와 지연에 대해 어느 정도 파악할 수 있습니다. 자세한 내용은 System Identification Toolbox™ 문서에서 다음 항목을 참조하십시오.
각 모델 구조에는 그와 관련된 동특성 요소, 즉 모델 파라미터가 있습니다. 이러한 파라미터의 값을 수동으로 또는 자동으로 조정하여 측정된 또는 시뮬레이션된 응답 데이터에 만족스럽게 일치하는 식별된 모델을 찾습니다. 어느 구조가 가장 적합한지 불확실하다면 많은 경우에 가장 간단한 모델 구조인 1개의 극점을 갖는 전달 함수로 시작하는 것이 좋습니다. 그런 다음 플랜트 응답과 측정된 출력이 만족스럽게 일치할 때까지 점진적으로 고차 구조를 사용하여 식별을 시도해 볼 수 있습니다. 상태공간 모델 구조에서는 입력-출력 데이터에 대한 분석을 바탕으로 최적의 모델 차수를 자동으로 검색할 수 있습니다.
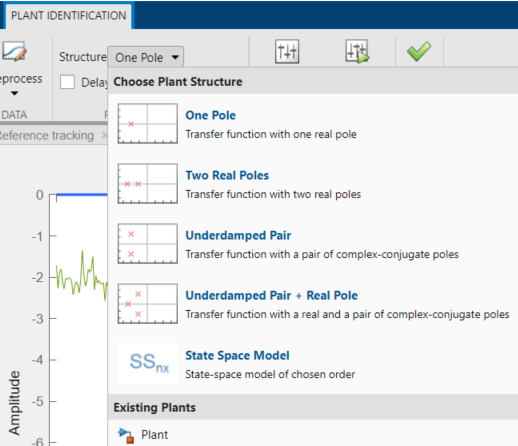
플랜트 식별 작업을 시작하면 기본적으로 1개의 실수 극점을 갖는 전달 함수 모델 구조가 선택됩니다. 이 디폴트 설정은 데이터의 성격에 민감하지 않으며 사용자의 응용 분야에 적합하지 않을 수 있습니다. 따라서 파라미터 식별을 수행하기 전에 적합한 모델 구조를 선택하는 것이 권장됩니다.
공정 모델
공정 모델은 3개 이하의 극점을 갖는 전달 함수로, 영점, 지연 및 적분기 요소를 추가하여 증강할 수 있습니다. 공정 모델은 시정수, 이득 및 시간 지연을 나타내는 모델 파라미터에 의해 파라미터화됩니다. PID 조정기의 플랜트 식별 탭에서 구조 메뉴를 사용하여 공정 모델을 선택합니다.
어느 구조를 선택하든 체크박스를 사용하여 선택적으로 지연 1개, 영점 1개 및/또는 적분기 요소 1개를 추가할 수 있습니다. 파라미터 편집을 클릭하여 이러한 선택 사항으로 구성된 모델 전달 함수를 확인합니다.

사용 가능한 가장 간단한 공정 모델은 다음과 같은 1개의 실수 극점을 갖고 영점 또는 지연 요소는 없는 전달 함수입니다.
이 모델은 파라미터 K, 이득, 시정수 T1로 정의됩니다. 가장 복잡한 공정 모델 구조는 극점 3개, 추가적인 적분기 1개, 영점 1개, 시간 지연 1개를 갖습니다. 그 예로 실수 극점 1개와 켤레 복소수 극점 1쌍을 갖는 다음 모델을 들 수 있습니다.
이 모델에서 구성 가능한 파라미터는 극점 및 영점과 관련된 시정수 T1, Tω, Tz입니다. 나머지 파라미터는 감쇠 계수 ζ, 이득 K, 시간 지연 τ입니다.
공정 모델 유형을 선택하면 PID 조정기가 자동으로 플랜트 파라미터에 대한 초기값을 계산하고 추정된 모델 응답과 측정된 데이터 또는 시뮬레이션된 데이터를 보여주는 플롯을 표시합니다. 파라미터 값은 시각적으로 표시기를 사용하여 플롯에서 편집하거나 플랜트 파라미터 편집기를 사용하여 수치적으로 편집할 수 있습니다. 이 과정을 보여주는 예제는 응답 데이터에서 대화형 방식으로 플랜트 파라미터 추정하기 항목을 참조하십시오.
다음 표에는 공정 모델 유형을 정의하는 다양한 파라미터가 요약되어 있습니다.
| 파라미터 | 사용 모델 | 설명 |
|---|---|---|
| K — 이득 | 모든 전달 함수 | 임의의 실수 값을 가질 수 있음. 플롯에서 플랜트 응답 곡선(파란색)을 위 또는 아래로 끌어서 K를 조정할 수 있습니다. |
| T1 — 첫 번째 시정수 | 1개 이상의 실수 극점을 갖는 전달 함수 | 0과 T(측정된 데이터 또는 시뮬레이션된 데이터의 시간 범위) 사이의 임의의 값을 가질 수 있음. 플롯에서 빨간색 x를 왼쪽으로(0 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 T1을 조정할 수 있습니다. |
| T2 — 두 번째 시정수 | 2개의 실수 극점을 갖는 전달 함수 | 0과 T(측정된 데이터 또는 시뮬레이션된 데이터의 시간 범위) 사이의 임의의 값을 가질 수 있음. 플롯에서 자홍색 x를 왼쪽으로(0 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 T2를 조정할 수 있습니다. |
| Tω — 고유 주파수 ωn과 관련된 시정수, 여기서 Tω = 1/ωn | 부족감쇠된 극점 쌍(켤레 복소수 쌍)을 갖는 전달 함수 | 0과 T(측정된 데이터 또는 시뮬레이션된 데이터의 시간 범위) 사이의 임의의 값을 가질 수 있음. 플롯에서 주황색 응답 포락선 곡선 중 하나를 왼쪽으로(0 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 Tω를 조정할 수 있습니다. |
| ζ — 감쇠 계수 | 부족감쇠된 극점 쌍(켤레 복소수 쌍)을 갖는 전달 함수 | 0과 1 사이의 임의의 값을 가질 수 있음. 플롯에서 주황색 응답 포락선 곡선 중 하나를 왼쪽으로(0 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 ζ를 조정할 수 있습니다. |
| τ — 전달 지연 | 모든 전달 함수 | 0과 T(측정된 데이터 또는 시뮬레이션된 데이터의 시간 범위) 사이의 임의의 값을 가질 수 있음. 플롯에서 주황색 세로 막대를 왼쪽으로(0 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 τ를 조정할 수 있습니다. |
| Tz — 모델 영점 | 모든 전달 함수 | –T와 T(측정된 데이터 또는 시뮬레이션된 데이터의 시간 범위) 사이의 임의의 값을 가질 수 있음. 플롯에서 빨간색 원을 왼쪽으로(-T 쪽으로) 또는 오른쪽으로(T 쪽으로) 끌어서 Tz를 조정합니다. |
| 적분기 | 모든 전달 함수 | 전달 함수에 인자 1/s을 더합니다. 조정할 관련 파라미터가 없습니다. |
상태공간 모델
식별에 사용되는 상태공간 모델 구조는 주로 상태의 개수, 즉 모델 차수의 선택으로 정의됩니다. 공정 모델 구조가 지원하는 것보다 더 고차의 모델이 필요한 경우, 측정되거나 시뮬레이션된 I/O 데이터에 만족스럽게 일치시키려면 상태공간 모델 구조를 사용하십시오. 상태공간 모델 구조에서 시스템 동특성은 상태 방정식과 출력 방정식으로 표현됩니다.
x는 상태 변수로 구성된 벡터로, 선택한 모델 차수를 기반으로 자동으로 선택됩니다. u는 입력 신호를 나타내고 y는 출력 신호를 나타냅니다.
상태공간 모델 구조를 사용하려면 플랜트 식별 탭의 구조 메뉴에서 상태공간 모델을 선택하십시오. 그런 다음 구조 구성을 클릭하여 상태공간 모델 대화 상자를 엽니다.

대화 상자를 사용하여 모델 차수, 지연 및 피드스루 특성을 지정합니다. 차수가 불확실한 경우 범위에서 최상의 값 선택을 선택하고 차수 범위를 입력합니다. 이렇게 하고 플랜트 추정 탭에서 추정을 클릭하면 한켈 특이값으로 구성된 막대 차트가 표시됩니다. 시스템 동특성에 상당한 영향을 미치는 한켈 특이값의 개수와 동일한 모델 차수를 선택합니다.
상태공간 모델 구조를 선택한 경우, 유효한 추정된 모델이 존재하는 경우에만 식별 플롯에 플랜트 응답(파란색) 곡선이 표시됩니다. 예를 들어, 공정 모델을 추정한 후에 구조를 변경하면 추정된 모델에 상응하는 상태공간 모델이 표시됩니다. 모델 차수를 변경할 경우 새 추정이 수행되기 전까지 플랜트 응답 곡선이 사라집니다.
상태공간 모델 구조를 사용할 때는 모델 파라미터와 직접 상호 작용할 수 없습니다. 따라서 식별된 모델은 모델의 상태 변수에 물리적 의미가 아직 부여되지 않은, 구조화되지 않은 모델로 간주되어야 합니다.
단, 모델의 입력 지연과 전체 지연을 시각적으로 조정할 수는 있습니다. 시간 지연이 있는 상태공간 모델을 선택한 경우, 지연은 플롯에 주황색 세로 막대로 표현됩니다. 지연 값을 변경하려면 이 막대를 가로로 끌어서 놓으십시오. 모델 이득을 조정하려면 플랜트 응답(파란색) 곡선을 위 또는 아래로 끌어서 놓으십시오.
기존 플랜트 모델
이전에 가져온 플랜트 모델 또는 식별된 플랜트 모델은 모두 플랜트 목록 영역에 나열됩니다.

이런 플랜트 중 하나를 사용하여 모델 구조를 정의하고 모델 파라미터 값을 초기화할 수 있습니다. 이렇게 하려면 플랜트 식별 탭의 구조 메뉴에서 선형 플랜트 모델을 선택하십시오.

선택하는 플랜트가 공정 모델(idproc (System Identification Toolbox) 객체)인 경우 PID 조정기는 식별된 플랜트의 해당 구조를 사용합니다. 플랜트가 이외의 모델 유형인 경우 PID 조정기는 상태공간 모델 구조를 사용합니다. 앱은 선택된 플랜트를 사용하여 추정된 플랜트의 파라미터를 초기화합니다.
모델 구조 간 전환하기
하나의 모델 구조에서 다른 모델 구조로 변경하면 소프트웨어는 모델 특성(극점-영점 위치, 이득, 지연)을 가능한 한 많이 보존하려고 합니다. 예를 들어, 1개 극점 모델에서 2개 극점 모델로 변경할 경우 T1, , τ 및 K의 기존 값은 유지되고 TzT2가 디폴트 값(또는 이전에 할당된 값이 있으면 그 값)으로 초기화됩니다.
파라미터 값 추정하기
모델 구조를 선택한 후에는 추정된 모델 응답과 측정된 또는 시뮬레이션된 입력/출력 데이터가 잘 일치되도록 직접 또는 자동으로 파라미터 값을 조정할 수 있는 방법이 몇 가지 있습니다. 이러한 방법을 모두 보여주는 예제는 다음을 참조하십시오.
응답 데이터에서 대화형 방식으로 플랜트 파라미터 추정하기 (Control System Toolbox™)
Interactively Estimate Plant from Measured or Simulated Response Data Simulink® Control Design™)
PID 조정기는 모델 구조가 선택되었을 때 모델 파라미터를 영리하게 초기화하지 않습니다. 대신 플롯에 반영된 모델 파라미터 초기값이 범위 값 중간에서 임의로 선택됩니다. 파라미터 값을 직접 조정하기 전에 좋은 출발점이 필요한 경우 플랜트 식별 탭에서 초기화 및 추정 옵션을 사용하십시오.
초기 조건 처리하기
시스템 응답이 초기 조건의 영향을 강하게 받는 경우가 있습니다. 따라서 이런 경우에는 입력-출력 관계를 전달 함수 형식으로 설명하는 것은 관측된 데이터를 피팅하는 데 충분하지 않습니다. 약하게 감쇠되는 모드를 포함하는 시스템의 경우 특히 그렇습니다. PID 조정기에서는 초기 조건 응답과 입력 응답의 합이 관측된 출력과 잘 일치되도록 모델 파라미터 외에도 초기 조건을 추정할 수 있습니다. 추정 옵션 대화 상자를 사용하여 자동 추정 중에 초기 조건이 처리되어야 하는 방식을 지정하십시오. 기본적으로 초기 조건 처리(0 값을 수정할지 아니면 추정할지 여부)는 추정 알고리즘에 의해 자동으로 수행됩니다. 그러나 초기 조건 메뉴를 사용하여 특정 선택 사항을 적용할 수 있습니다.
초기 조건은 자동 추정으로만 추정할 수 있습니다. 모델 파라미터와 달리 직접 수정이 불가능합니다. 그러나 일단 추정된 후에는 모델 구조를 변경하거나 새로운 식별 데이터를 가져오지 않는 이상 추정된 값 그대로 남아 있습니다.
자동 추정을 수행한 후에 모델 파라미터를 수정할 경우 모델 응답은 초기 조건에서 비롯된 고정적인(즉, 모델 파라미터에 대해 독립적인) 영향을 보일 것입니다. 다음 플롯에서는 초기 조건의 영향이 특히 유의미한 것으로 나타났습니다. 이후 지연을 조정한 후에, 응답 중에서 입력 지연 마커(τ 조정기) 왼쪽에 있는 부분은 순수하게 초기 조건으로 인한 것입니다. τ 조정기 오른쪽에 있는 부분은 입력 신호와 초기 조건의 영향을 모두 받습니다.
