Active Disturbance Rejection Control
라이브러리:
Simulink Control Design /
Adaptive Control
설명
Active Disturbance Rejection Control 블록을 사용하면 동특성과 내부 외란, 외부 외란을 알 수 없는 플랜트에 대한 능동 외란 제거 제어(ADRC)를 설계할 수 있습니다. ADRC는 모델 프리(model-free) 제어 기법으로, 오직 플랜트 동특성에 대한 근사만으로 강인한 외란 제거를 수행하는 제어기를 설계할 수 있습니다.
이 블록은 알려진 시스템 동특성의 1차 또는 2차 모델 근사를 사용하고 이와 함께 플랜트의 확장 상태로 모델링된 알 수 없는 동특성과 외란을 사용합니다. 일반적으로 차수는 동작 범위 내에서 플랜트의 개루프 계단 응답을 바탕으로 결정합니다.
1차 근사 —
2차 근사 —
여기서 각각은 다음을 나타냅니다.
y(t)는 플랜트 출력입니다.
u(t)는 입력 신호입니다.
b0은 임계 이득으로, 입력 u(t)에 대한 플랜트 응답을 설명하는 추정 이득입니다.
f(t)는 전체 외란으로, 알 수 없는 동특성과 기타 외란을 포함합니다.
이 블록은 ESO(확장 상태 관측기)를 사용하여 f(t)를 추정하고, 모델 근사의 알려진 부분에 대해 추정된 외란의 영향을 줄임으로써 외란 제거를 구현합니다. ADRC를 조정하려면 시간 영역, 모델 유형과 임계 이득, 제어기와 관측기의 대역폭, 초기 조건을 적절하게 설정합니다.
자세한 내용은 능동 외란 제거 제어(ADRC) 항목을 참조하십시오.
예제

Design Active Disturbance Rejection Control for Water-Tank System
Design ADRC for a water-tank model and compare performance against a gain-scheduled PID controller.

Design Active Disturbance Rejection Control for Boost Converter
Design ADRC for a boost converter model and compare performance against a PID controller tuned on a linearized model.
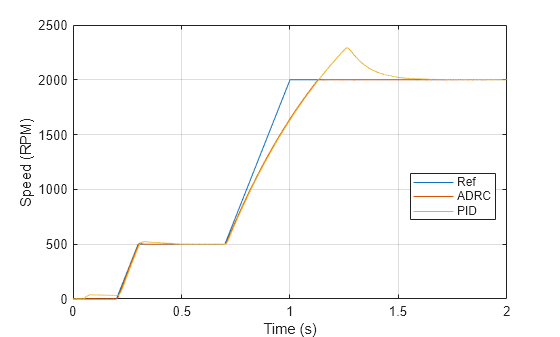
PWM을 사용한 BLDC 속도 제어를 위한 능동 외란 제거 제어 설계
펄스 폭 변조를 사용하여 브러시리스 DC 모터 속도 제어기를 위한 ADRC를 설계합니다.

Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.