Sqrt
Calculate square root, signed square root, or reciprocal of square root
Libraries:
Simulink /
Math Operations
HDL Coder /
HDL Floating Point Operations
HDL Coder /
Math Operations
Alternative Configurations of Sqrt Block:
Signed Sqrt | Reciprocal Sqrt | Square Root | Signed Square Root | Reciprocal Square Root
Description
The Sqrt block calculates the square root, signed square root, or reciprocal of square root on the input signal. Select one of the following functions from the Function parameter list.
| Function | Description | Mathematical Expression | MATLAB® Equivalent |
|---|---|---|---|
sqrt
| Square root of the input |
|
sqrt
|
signedSqrt
| Square root of the absolute value of the input, multiplied by the sign of the input |
| — |
rSqrt
| Reciprocal of the square root of the input |
| — |
The block icon changes to match the function.
Examples
This example shows how to compute the square root of a negative-valued input signal as complex-valued output.
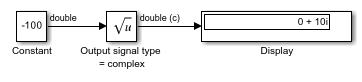
By setting the Function to sqrt and Output signal type to complex, the block produces the correct result of 0 + 10i for an input of -100. If you change the Output signal type to auto or real, the block outputs NaN.
This example shows how to compute the signed square root of a negative-valued input signal.
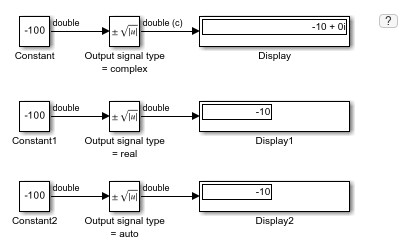
When the block input is negative and you set the Function to signedSqrt, the Sqrt block output is the same for any setting of the Output signal type parameter. By setting the Numerica display format of the first Display block to decimal (Stored Integer), you can see the value of the imaginary part for the complex output.
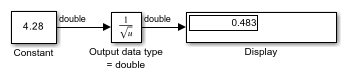
This example shows how to compute the rSqrt of a floating-point input signal. The Sqrt block has the following settings:
Method =
Newton-RaphsonNumber of iterations =
1Intermediate results data type =
Inherit: Inherit from input
After one iteration of the Newton-Raphson algorithm, the block output is within 0.0004 of the final value (0.4834).
This example shows how to compute the rSqrt of a fixed-point input signal. The Sqrt block has the following settings:
Method =
Newton-RaphsonNumber of iterations =
1Intermediate results data type =
Inherit: Inherit from input
After one iteration of the Newton-Raphson algorithm, the block output is within 0.0459 of the final value (0.4834).

Ports
Input
Output
Parameters
Main
Specify the mathematical function that the block calculates. The block icon changes to match the function you select.
| Function | Block Icon |
|---|---|
sqrt
|
|
signedSqrt
|
|
rSqrt
|
|
The default value depends on the block configuration.
sqrtdefault — Sqrt and Square Root blockssignedSqrtdefault — Signed Sqrt and Signed Square Root blocksrSqrtdefault — Reciprocal Sqrt and Reciprocal Square Root blocks
Programmatic Use
Block Parameter:
Operator |
| Type: character vector |
Values:
'sqrt' | 'signedSqrt'
| 'rSqrt' |
Specify the output signal type of the block.
| Function | Input Signal Type | Output Signal Type | ||
|---|---|---|---|---|
| Auto | Real | Complex | ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
Programmatic Use
Block Parameter:
OutputSignalType |
| Type: character vector |
Values:
'auto' | 'real' |
'complex' |
Default:
'auto' |
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SampleTime |
| Values: | "-1" (default) | scalar or vector in quotes |
Algorithm
Specify the method for computing the reciprocal of a square root.
| Method | Data Types Supported | When to Use This Method |
|---|---|---|
Exact
| Floating point | You do not want an approximation. The input or output must be floating point. |
Newton-Raphson
| Floating-point, fixed-point, and built-in integer types | You want a fast, approximate calculation. |
The Exact method provides results that are
consistent with MATLAB computations.
Dependencies
To enable this parameter, set Function to
rSqrt.
When Function is set to
sqrt or
signedSqrt, this parameter is set to
Exact.
Programmatic Use
Block Parameter:
AlgorithmType |
| Type: character vector |
Values:
'Exact' |
'Newton-Raphson' |
Default:
'Exact' |
Specify the number of iterations to perform the Newton-Raphson
algorithm. This parameter is valid with the rSqrt
function and the Newton-Raphson value for
Method.
If you enter 0, the block output is the initial
guess of the Newton-Raphson algorithm.
Programmatic Use
Block Parameter:
Iterations |
| Type: character vector |
| Values: integer |
Default:
'3' |
Data Types
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Specify the data type for intermediate results when you set
Function to sqrt or
rSqrt.
The type can be inherited, specified directly, or expressed as a data
type object such as a Simulink.NumericType
object.
To avoid overflow with the sqrt function, the intermediate data
type must be larger than or equal to a data type that can contain the
square of the output data type.
Follow these guidelines on setting an intermediate data type
explicitly for the square root function, sqrt:
| Input and Output Data Types | Intermediate Data Type |
|---|---|
| Input or output is double. | Use double. |
| Input or output is single, and any non-single data type is not double. | Use single or double. |
| Input and output are fixed point. | Use fixed point. |
Follow these guidelines on setting an intermediate data type
explicitly for the reciprocal square root function,
rSqrt:
| Input and Output Data Types | Intermediate Data Type |
|---|---|
| Input is double and output is not single. | Use double. |
| Input is not single and output is double. | Use double. |
| Input and output are fixed point. | Use fixed point. |
Caution
Do not set Intermediate results data type to
Inherit: Inherit from output
when:
You select
Newton-Raphsonto compute the reciprocal of a square root.The input data type is floating point.
The output data type is fixed point.
Under these conditions, selecting Inherit: Inherit
from output yields suboptimal performance and
produces an error.
To avoid this error, convert the input signal from a floating-point to fixed-point data type. For example, insert a Data Type Conversion block in front of the Sqrt block to perform the conversion.
Dependencies
To enable this parameter, set Function to
sqrt or
rSqrt.
Programmatic Use
Block Parameter:
IntermediateResultsDataTypeStr |
| Type: character vector |
Values: 'Inherit:
Inherit via internal rule' | 'Inherit:
Inherit from input' | 'Inherit: Inherit
from output' | 'double' |
'single', 'int8',
'uint8', int16,
'uint16', 'int32',
'uint32', 'int64',
'uint64',
fixdt(1,16,0),
fixdt(1,16,2^0,0). '<data
type expression>' |
Default: 'Inherit:
Inherit via internal rule' |
Specify the output data type. The type can be inherited, specified
directly, or expressed as a data type object such as a
Simulink.NumericType object.
Dependencies
When input is a floating-point data type smaller than single
precision, the Inherit: Inherit via internal
rule output data type depends on the setting of
the Inherit floating-point output type smaller than single precision configuration parameter. Data types are smaller than single
precision when the number of bits needed to encode the data type is
less than the 32 bits needed to encode the single-precision data
type. For example, half and
int16 are smaller than single
precision.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values: 'Inherit:
Inherit via internal rule' | 'Inherit:
Inherit via back propagation' | 'Inherit:
Same as first input' | 'double'
| 'single' | 'half' |
'int8' | 'uint8' |
int16 | 'uint16' |
'int32' | 'uint32' |
'int64' | 'uint64' |
fixdt(1,16,0) |
fixdt(1,16,2^0,0) |
fixdt(1,16,2^0,0) | '<data
type expression>' |
Default: 'Inherit:
Same as first input' |
Specify the lower value of the output range that the software checks as a finite, real, double, scalar value.
If you specify a bus object as the data type for this block, do not
set the minimum value for bus data on the block. The software ignores
this setting. Instead, set the minimum values for bus elements of the
bus object specified as the data type. For more information, see Simulink.BusElement.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
Block Parameter:
OutMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the upper value of the output range that the software checks as a finite, real, double, scalar value.
If you specify a bus object as the data type for this block, do not
set the maximum value for bus data on the block. The software ignores
this setting. Instead, set the maximum values for bus elements of the
bus object specified as the data type. For more information, see Simulink.BusElement.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
Block Parameter:
OutMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Programmatic Use
Block
Parameter:
RndMeth |
| Type: character vector |
Values:
'Ceiling' | 'Convergent' | 'Floor' |
'Nearest' | 'Round' | 'Simplest' |
'Zero' |
Default:
'Floor' |
Select to lock the output data type setting of this block against changes by the Fixed-Point Tool and the Fixed-Point Advisor. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
Block Parameter:
LockScale |
| Type: character vector |
Values:
'off' |
'on' |
Default:
'off' |
Specify whether overflows saturate or wrap.
on— Overflows saturate to either the minimum or maximum value that the data type can represent.off— Overflows wrap to the appropriate value that the data type can represent.
For example, the maximum value that the signed 8-bit integer int8
can represent is 127. Any block operation result greater than this maximum value causes
overflow of the 8-bit integer.
With this parameter selected, the block output saturates at 127. Similarly, the block output saturates at a minimum output value of -128.
With this parameter cleared, the software interprets the overflow-causing value as
int8, which can produce an unintended result. For example, a block result of 130 (binary 1000 0010) expressed asint8is -126.
Tips
Consider selecting this parameter when your model has a possible overflow and you want explicit saturation protection in the generated code.
Consider clearing this parameter when you want to optimize efficiency of your generated code. Clearing this parameter also helps you to avoid overspecifying how a block handles out-of-range signals. For more information, see Troubleshoot Signal Range Errors.
When you select this parameter, saturation applies to every internal operation on the block, not just the output or result.
In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SaturateOnIntegerOverflow |
| Values: | 'on' (default) | 'off' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|