Memory
이전 시간 스텝의 입력을 출력
라이브러리:
Simulink /
Discrete
HDL Coder /
Discrete
설명
Memory 블록은 하나의 주 적분 시간 스텝만큼 자신의 입력을 유지하고 지연합니다. Iterator Subsystem에 배치된 경우 이 블록은 한 번 반복하는 동안 자신의 입력을 유지하고 지연합니다. 이 블록은 연속 신호 및 이산 신호를 받습니다. 이 블록은 하나의 입력을 받아 하나의 출력을 생성합니다. 각 신호는 스칼라, 벡터, 행렬 또는 N차원 배열일 수 있습니다. 입력이 스칼라가 아닌 경우 블록은 입력의 모든 요소를 같은 시간 스텝만큼 유지하고 지연합니다.
초기 조건 파라미터를 사용하여 첫 번째 시간 스텝에 대한 블록 출력을 지정합니다. 이 파라미터를 신중하게 선택하면 원치 않는 출력 동작을 최소화할 수 있습니다. 그러나 샘플 시간은 지정할 수 없습니다. 이 블록의 샘플 시간은 사용된 솔버 유형에 따라 달라지며, 또는 샘플 시간을 상속하도록 지정할 수도 있습니다. 샘플 시간 상속 파라미터는 샘플 시간을 상속할지 또는 솔버를 기반으로 할지 결정합니다.
팁
다음 조건이 둘 다 참이면 Memory 블록을 사용하지 마십시오.
모델에서 가변 스텝 솔버
ode15s또는ode113를 사용합니다.시뮬레이션 중에 블록에 대한 입력이 변경됩니다.
Memory 블록이 이산 샘플 시간을 상속할 경우 블록은 Unit Delay 블록과 유사합니다. 그러나 Memory 블록은 상태 기록을 지원하지 않습니다. 최종 상태를 기록해야 하는 경우 대신 Unit Delay 블록을 사용하십시오.
유사한 블록 간의 비교
Memory, Unit Delay, Zero-Order Hold 블록은 비슷한 기능을 제공하지만 각각 다른 기능을 가지고 있습니다. 또한, 각 블록의 용도도 다릅니다.
이 표에는 각 블록에 권장되는 사용법이 나와 있습니다.
| 블록 | 블록의 용도 | 참조 예제 |
|---|---|---|
| Unit Delay | 사용자가 지정한 이산 샘플 시간을 사용하여 지연을 구현합니다. 이 블록은 이산 샘플 시간을 사용하는 신호를 받고 출력합니다. |
|
| Memory | 하나의 주 적분 시간 스텝만큼 지연을 구현합니다. 블록이 연속(또는 보조 시간 스텝에서 고정) 신호를 받고 보조 시간 스텝에서 고정 신호를 출력하는 것이 이상적입니다. |
|
| Zero-Order Hold | 연속 샘플 시간을 갖는 입력 신호를 이산 샘플 시간을 갖는 출력 신호로 변환합니다. |
각 블록에는 다음과 같은 기능이 있습니다.
| 기능 | Memory | Unit Delay | Zero-Order Hold |
|---|---|---|---|
| 초기 조건 지정 | 예 | 예 | 아니요. 시간 t = 0에서의 블록 출력이 입력값과 일치해야 함. |
| 샘플 시간 지정 | 아니요. 블록은 전체 모델에 사용되는 구동 블록 또는 솔버의 샘플 시간만 상속할 수 있음. | 예 | 예 |
| 프레임 기반 신호 지원 | 아니요 | 예 | 예 |
| 상태 기록 지원 | 아니요 | 예 | 아니요 |
버스 지원
Memory 블록은 버스를 지원하는 블록입니다. 입력은 다음 제한 사항에 따라 가상 또는 비가상 버스 신호일 수 있습니다.
초기 조건은 0이거나, 0이 아닌 스칼라이거나, 유한한 숫자형 구조체여야 합니다.
초기 조건이 0 또는 구조체이고 사용자가 상태 이름을 지정할 경우 입력은 가상 버스가 될 수 없습니다.
초기 조건이 0이 아닌 스칼라이면 상태 이름을 지정할 수 없습니다.
초기 조건 구조체 지정에 대한 자세한 내용은 Specify Initial Conditions for Bus Elements 항목을 참조하십시오.
Memory 블록에 대한 비가상 버스 입력의 모든 신호는 연결된 bus 객체의 요소가 상속된 샘플 시간을 지정하더라도 동일한 샘플 시간을 가져야 합니다. Rate Transition 블록을 사용하여 개별 신호의 샘플 시간 또는 버스의 모든 신호의 샘플 시간을 변경할 수 있습니다. 자세한 내용은 비가상 버스의 샘플 시간 수정하기 항목과 Bus-Capable Blocks 항목을 참조하십시오.
버스로 구성된 배열을 Memory 블록에 대한 입력 신호로 사용할 수 있습니다. 다음 값으로 초기 조건 파라미터를 지정할 수 있습니다.
값
0. 이 경우, 버스로 구성된 배열의 모든 개별 신호는 초기값0을 사용합니다.버스로 구성된 배열의 각 개별 신호에 대한 초기 조건을 지정하는 구조체 배열.
버스 유형이 정의하는 각 요소에 대한 초기 조건을 지정하는 스칼라 구조체. 배열의 각 버스에 대해 동일한 초기 조건을 지정하려면 이 기법을 사용하십시오.
버스로 구성된 배열의 정의와 사용에 대한 자세한 내용은 Group Nonvirtual Buses in Arrays of Buses 항목을 참조하십시오.
예제
이 예제에서는 Memory 블록과 Clock 블록을 사용하여 시뮬레이션의 스텝 크기를 계산하고 표시하는 방법을 보여줍니다. Sum 블록은 Memory 블록이 생성하는 이전 시간 스텝에서의 시간을 Clock 블록이 생성하는 현재 시간에서 뺍니다.
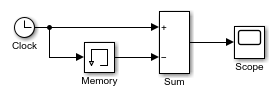
이 Memory 블록의 경우 샘플 시간 상속이 선택되어 있지 않기 때문에 모델을 시뮬레이션하는 데 있어 블록 샘플 시간은 솔버 유형에 따라 다릅니다. 이 경우, 모델은 고정 스텝 솔버를 사용합니다. 따라서 Memory 블록의 샘플 시간은 솔버 스텝 크기, 즉 1입니다.
Memory 블록을 Unit Delay 블록으로 교체하면 동일한 결과를 얻습니다. Unit Delay 블록은 이산 샘플 시간인 1을 상속합니다.
확장 예제

Capture the Velocity of a Bouncing Ball with the Memory Block
The sldemo_bounce example shows how to use the Second-Order
Integrator and Memory blocks to capture the velocity of a bouncing ball just
before it hits the ground.
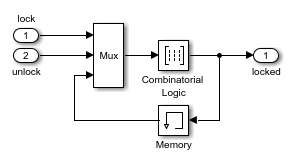
Combinatorial Logic 블록과 Memory 블록을 사용하여 유한 상태 머신 구현하기
sldemo_clutch 예제에서는 Memory 블록과 Combinatorial Logic 블록을 함께 사용하여 유한 상태 머신을 구현하는 방법을 보여줍니다.