폐루프 제어가 있는 엔진 시간 설정 모델
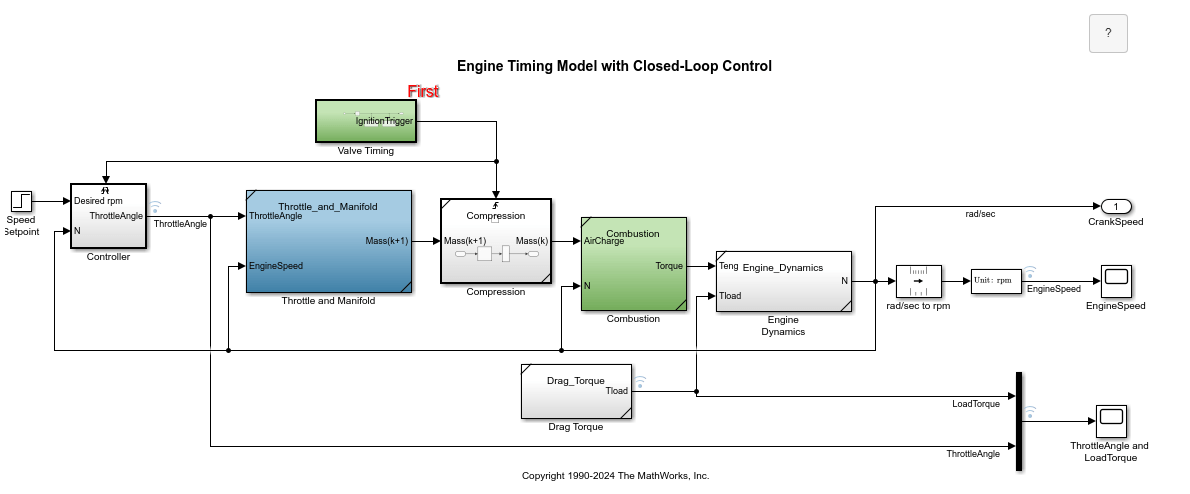
이 예제에서는 Model Engine Timing Using Triggered Subsystems 항목에서 설명되는 개루프 엔진 모델을 위한 폐루프 제어 알고리즘을 개발하고 구현하는 방법을 보여줍니다. 이 예제에서 모델 sldemo_enginewc에는 부하 토크의 변경이 최소한의 영향을 미치도록 신속 스로틀 액추에이터를 사용하여 엔진 속도를 조절하는 제어기가 포함되어 있습니다. 제어기는 이산 PI 제어기를 사용하여 구현됩니다.
폐루프 모델
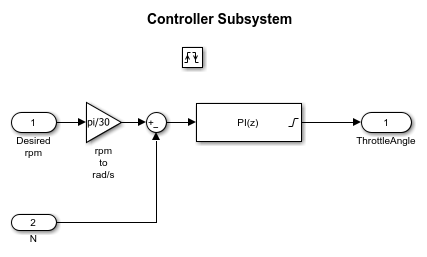
제어기 수식
이 예제에서는 다음 수식의 설명과 같이 비례-적분(PI) 제어기를 사용합니다.




적분항은 설정점(set point)이 변경됨에 따라 정상 상태 스로틀을 조정하고 비례항은 적분기로 인해 생기는 위상 지연을 보상합니다. 수식의 적분항은 이산시간 근사를 사용하여 구현됩니다. 업계에서 일반적으로 볼 수 있듯이, 제어기 실행은 엔진의 크랭크샤프트 회전과 동기화됩니다. sldemo_enginewc 모델의 Controller 서브시스템은 Discrete PID controller 블록을 사용하며, 이 블록은 마이크로프로세서 구현에 적합한 이산시간으로 PI 제어기를 구현합니다. 제어기는 서브시스템이 트리거될 때마다 실행됩니다.
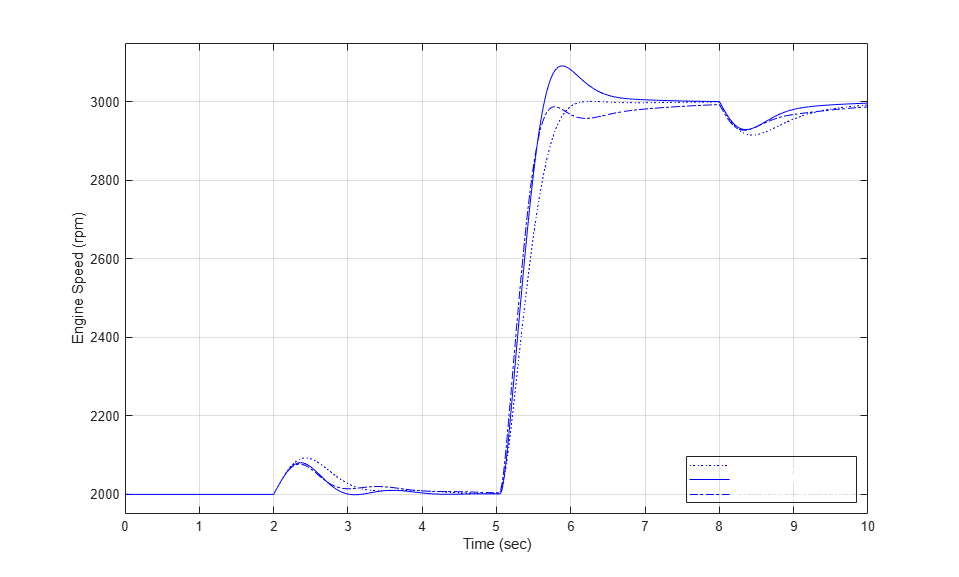
모델 시뮬레이션하고 결과 시각화하기
모델은 이름이 sldemo_enginewc_output인 데이터 세트의 기본 작업 공간에 출력 데이터를 기록합니다. 또는 Simulink® 데이터 인스펙터를 사용하여 기록된 신호를 시각화할 수 있습니다. 자세한 내용은 시뮬레이션 데이터 인스펙터 항목을 참조하십시오. t = 5초에서 속도 설정점은 2000rpm에서 3000rpm으로 단계적으로 증가합니다. 토크 외란은 개루프 모델 sldemo_engine에서 사용된 외란과 동일합니다. 제어기 파라미터는 정상 상태 오차가 발생하지 않고 빠른 과도 응답을 달성하도록 조정되었습니다. 정상 상태 응답은 Ki 값과 Kp 값의 서로 다른 세 가지 세트를 사용하며 표시되며, 이는 엔진 모델의 정상 상태 응답에 대한 비례 이득(Kp)과 적분 이득(Ki)의 상태적인 효과를 파악하는 데 유용합니다. PI 제어기는 MATLAB® 명령줄에서 조정할 수 있습니다.
참고 항목
Triggered Subsystem | Subsystem Reference | Discrete PID Controller | Integrator | Second-Order Integrator
도움말 항목
- Model Engine Timing Using Triggered Subsystems
- Powertrain Blockset
- Convert Between Subsystems and Referenced Subsystems
- Create and Use Referenced Subsystems in Models
- Enable Signal Logging for Model
참고 문헌
[1] Crossley, P. R., and J. A. Cook. “A Nonlinear Engine Model for Drivetrain System Development.” International Conference on Control 1991. Control ’91 1991, pp. 921–25 vol.2. IEEE Xplore, DOI.org (Crossref), https://ieeexplore.ieee.org/abstract/document/98573.
[2] The Simulink Model. Developed by Ken Butts, Ford Motor Company. Modified by Paul Barnard, Ted Liefeld and Stan Quinn, MathWorks®, 1994–7."
[3] Moskwa, John J., and J. Karl Hedrick. “Automotive Engine Modeling for Real Time Control Application.” 1987 American Control Conference, 1987, pp. 341–46. IEEE Xplore, DOIː 10.23919/ACC.1987.4789343.
[4] Powell, B. K., and J. A. Cook. “Nonlinear Low Frequency Phenomenological Engine Modeling and Analysis.” 1987 American control conference, 1987, pp. 332–40. IEEE Xplore, DOIː 10.23919/ACC.1987.4789342.
[5] Weeks, Robert W., and John J. Moskwa. “Automotive Engine Modeling for Real-Time Control Using MATLAB/SIMULINK.” SAE transactions, vol. 104, 1995, pp. 295–309. JSTOR, https://www.jstor.org/stable/44473229.