Enable
서브시스템이나 모델에 인에이블 포트 추가
라이브러리:
Simulink /
Ports & Subsystems
HDL Coder /
Ports & Subsystems
설명
Enable 블록을 사용하면 서브시스템이나 모델의 실행을 외부 신호로 제어할 수 있습니다. 이 기능을 활성화하려면 Subsystem 블록에 이 블록을 추가하거나, Model 블록이 참조하는 모델의 루트 수준에 이 블록을 추가하십시오.
모델의 루트 수준에서 인에이블 포트를 사용하는 경우 다음을 수행하십시오.
멀티레이트 모델의 경우, 솔버를 싱글태스킹으로 설정합니다.
고정 스텝 크기를 갖는 모델의 경우, 모델에서 적어도 하나의 블록이 지정된 고정 스텝 크기의 레이트로 실행되어야 합니다.
예제

Enabled Subsystem을 사용하여 제어 알고리즘 구현하기
이 예제에서는 Enabled Subsystem을 사용하여 이진 논리형 신호를 기반으로 제어 알고리즘을 구현하는 방법을 보여줍니다. Enabled Subsystem은 이진 신호가 양수 값을 갖고 제어 알고리즘을 구현할 때 실행됩니다. 이 예제에서는 불안정한 동적 시스템을 안정화하는 데 슈퍼 트위스팅(super-twisting) 제어 알고리즘이 사용됩니다. 슈퍼 트위스팅(super-twisting) 알고리즘은 강력한 성능으로 잘 알려진 슬라이딩 모드 제어 기법 중 하나입니다.
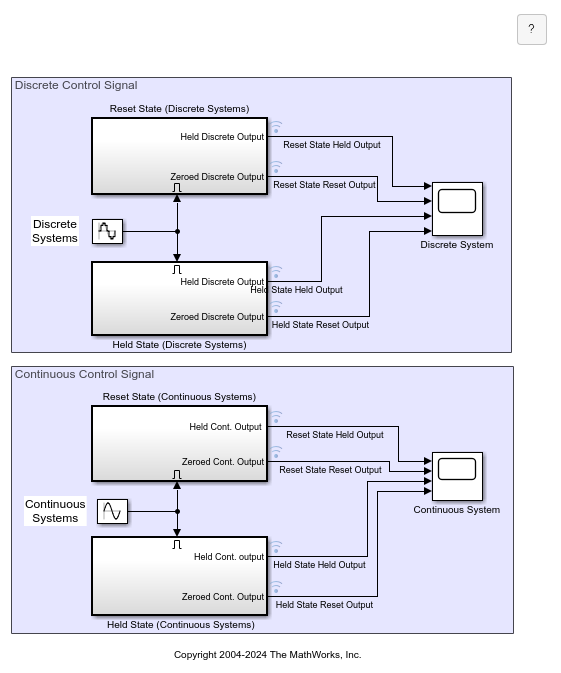
Control Block States and Output of Enabled Subsystem
Reset or hold states of blocks inside an Enabled Subsystem block when the subsystem is disabled and how to control the subsystem output. In this example, you see four different combinations of state and output value configurations for both discrete and continuous control signals. When the enabled subsystem is disabled, the combinations work as follows:
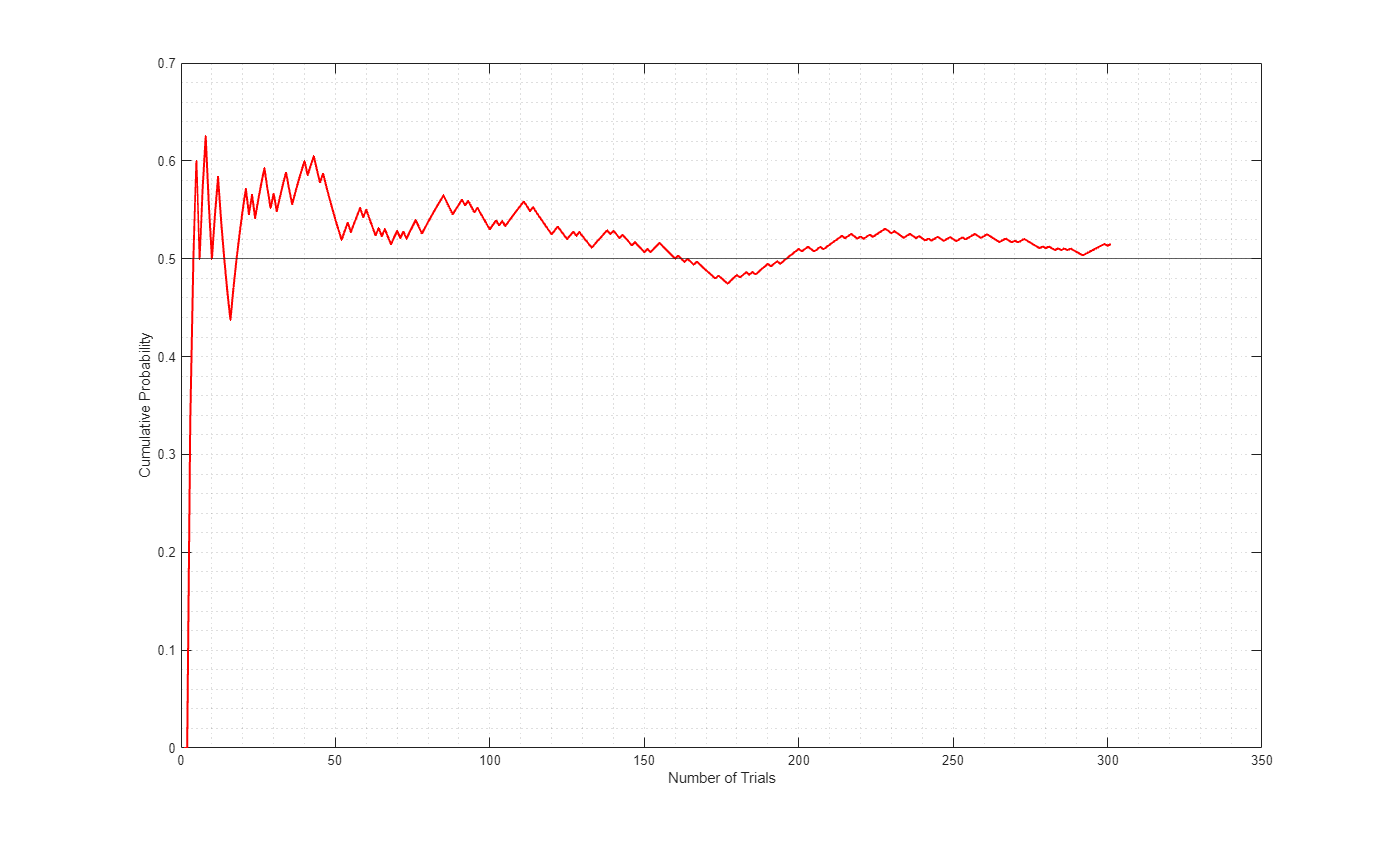
Exploring Law of Large Numbers using MATLAB System Block
Use MATLAB System blocks to illustrate the law of large numbers in Simulink.
Counters Using Conditionally Executed Subsystems
Implement counters using Enabled and Triggered subsystems. In this example, the model sldemo_counters controls flow of water into a tank and uses a counter to count the number of times overflow occurs, where overflow occurs when the water level in the tank is 8 meters or more for 30 seconds or more.

Building a Clutch Lock-Up Model
Use Simulink® to model and simulate a rotating clutch system. Although modeling a clutch system is difficult because of topological changes in the system dynamics during lockup, this example shows how enabled subsystem can easily handle such problems. We illustrate how to employ important Simulink modeling concepts in the creation of the clutch simulation. Designers can apply these concepts to many models with strong discontinuities and constraints that may change dynamically.
포트
출력
파라미터
블록 특성
데이터형 |
|
직접 피드스루 |
|
다차원 신호 |
|
가변 크기 신호 |
|
영점교차 검출 |
|
확장 기능
버전 내역
R2006a 이전에 개발됨