Inertia
이상적 회전 기계 관성

라이브러리:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
설명
Inertia 블록은 다음 방정식으로 설명되는 이상적인 회전 기계 관성을 나타냅니다.
여기서 각각은 다음과 같습니다.
T는 관성 토크입니다.
J는 관성입니다.
ω는 각속도입니다.
t는 시간입니다.
기본적으로 이 블록에는 1개의 회전 기계 에너지 보존 포트가 있습니다. 블록에서 양의 방향은 해당 포트에서 기준점으로 향하는 방향입니다. 즉, 관성이 양의 방향으로 가속되면 관성 토크가 양수입니다.
일부 응용 사례에서는 관례적으로 블록 다이어그램 레이아웃에서 관성을 다른 요소와 직렬로 표시합니다. 이 활용 사례를 지원하기 위해 그래픽 포트 수 파라미터를 통해 두 번째 포트를 블록 아이콘의 반대쪽에 표시할 수 있습니다. 2-포트 Variant는 그래픽 용도로만 제공됩니다. 두 포트는 각속도가 동일하므로 포트가 하나이든 두 개이든 블록은 정확히 동일하게 작동합니다. 블록 아이콘은 그래픽 포트 수 파라미터의 값에 따라 달라집니다.
| 그래픽 포트 수 | 블록 아이콘 |
|---|---|
|
|
|
|

변수
시뮬레이션 전에 블록 변수의 우선 순위와 초기 목표값을 설정하려면 블록 대화 상자 또는 속성 인스펙터의 초기 목표값 섹션을 사용합니다. 자세한 내용은 Set Priority and Initial Target for Block Variables 항목을 참조하십시오.
공칭 값은 모델에서 변수의 예상 크기를 지정하는 방법을 제공합니다. 공칭 값을 기반으로 시스템 스케일링을 사용하면 시뮬레이션 강인성이 향상됩니다. 공칭 값은 다른 소스에서 가져올 수 있으며, 그중 하나가 블록 대화 상자 또는 속성 인스펙터의 공칭 값 섹션입니다. 자세한 내용은 Modify Nominal Values for a Block Variable 항목을 참조하십시오.
예제
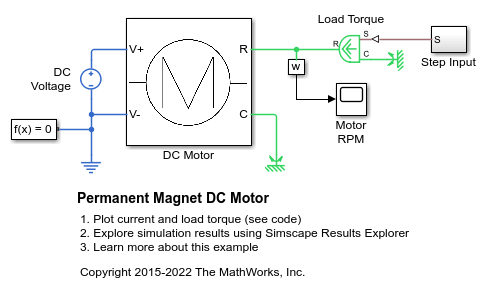
영구 자석 DC 모터
이 예제에서는 테스트 하네스와 Simscape™ 블록을 사용하여 DC 모터의 무부하 속도, 무부하 전류, 스톨 토크에 대한 제조업체 사양을 검증하는 방법을 보여줍니다.
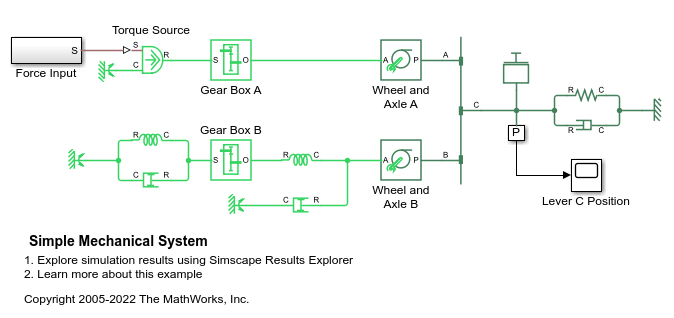
단순한 기계 시스템
이 예제는 회전 운동과 병진 운동을 연결하는 시스템의 모델을 보여줍니다. 합산 레버는 질량, 점성 마찰, 조인트 C에 연결된 스프링으로 구성된 부하를 구동합니다. 조인트 B는 휠과 차축, 기어 박스를 통해 기준점에 연결된 두 개의 회전 스프링에 매달려 있습니다. 조인트 A는 기어 박스, 휠 및 차축 메커니즘을 통해 토크 소스에 연결되어 있습니다.
포트
보존
파라미터
확장 기능
버전 내역
R2007a에 개발됨