단순한 기계 시스템
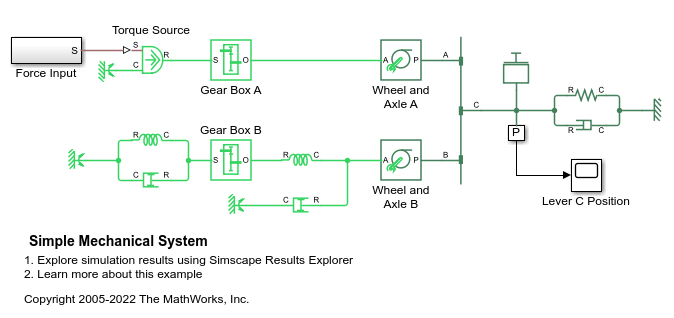
이 예제는 회전 운동과 병진 운동을 연결하는 시스템의 모델을 보여줍니다. 합산 레버는 질량, 점성 마찰, 조인트 C에 연결된 스프링으로 구성된 부하를 구동합니다. 조인트 B는 휠과 차축, 기어 박스를 통해 기준점에 연결된 두 개의 회전 스프링에 매달려 있습니다. 조인트 A는 기어 박스, 휠 및 차축 메커니즘을 통해 토크 소스에 연결되어 있습니다.
모델
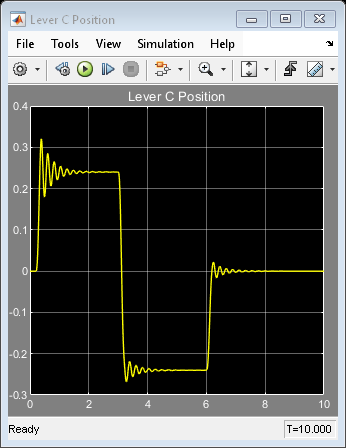
스코프의 시뮬레이션 결과
이 예제는 회전 운동과 병진 운동을 연결하는 시스템의 모델을 보여줍니다. 합산 레버는 질량, 점성 마찰, 조인트 C에 연결된 스프링으로 구성된 부하를 구동합니다. 조인트 B는 휠과 차축, 기어 박스를 통해 기준점에 연결된 두 개의 회전 스프링에 매달려 있습니다. 조인트 A는 기어 박스, 휠 및 차축 메커니즘을 통해 토크 소스에 연결되어 있습니다.