Ideal Rotational Motion Sensor
회전 기계 시스템의 모션 센서

라이브러리:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
설명
Ideal Rotational Motion Sensor 블록은 이상적인 회전 기계 모션 센서를 나타냅니다. 즉, 2개의 회전 기계 노드 간에 측정된 Across 변수를 가속도, 각속도 또는 위치(각도)에 비례하는 제어 신호로 변환하는 장치입니다. 초기 각위치(오프셋)를 블록 파라미터로 지정할 수 있습니다.
이 센서는 관성, 마찰, 지연, 에너지 소비 등을 고려하지 않기 때문에 이상적입니다.
연결부 R과 연결부 C는 모션이 모니터링되는 노드에 이 블록을 연결하는 회전 기계 에너지 보존 포트입니다. 블록에서 양의 방향은 포트 R에서 포트 C 방향입니다. 즉, 속도는 ω = ωR – ωC로 측정됩니다. 여기서 ωR, ωC는 각각 포트 R과 포트 C에서의 절대 각속도입니다. 측정 기준 파라미터를 사용하여 포트 C를 비활성화하고 접지를 기준으로 측정할 수 있습니다.
연결부 α, W, A는 각각 각가속도, 속도, 변위에 대한 물리 신호 출력 포트입니다. 이러한 포트의 가시성은 블록 파라미터에 의해 제어됩니다. 포트 α를 활성화하면 블록은 속도를 기반으로 가속도를 측정하기 위해 추가 연산을 수행합니다. 모델이 불필요하게 복잡해지지 않도록 블록의 각 인스턴스에서는 측정에 실제로 사용하는 포트만 활성화하는 것이 좋습니다.
[0, 2*pi]로 각도 래핑 체크박스를 선택하면 각변위 출력 범위를 조정할 수 있습니다. 선택한 경우, 객체에서 수행되는 회전 수 및 회전 방향에 관계없이 각변위를 0과 2π라디안(360도) 사이의 범위 내로 유지할 수 있습니다. 이 체크박스를 선택 해제하면 출력 범위에 제한이 없습니다.
다음 그림은 두 옵션 간의 차이를 보여줍니다.
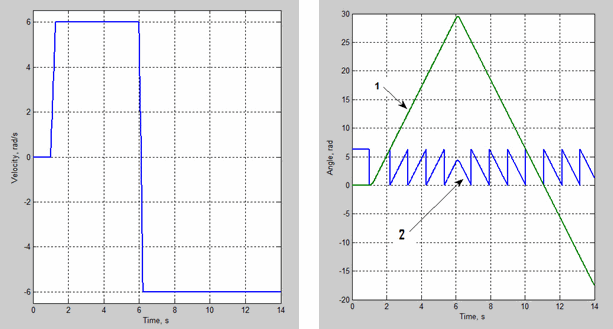
이 예제에서는 객체가 처음 5초 동안 양의 방향으로 6 rad/s의 속력으로 움직이다가 동일한 속력으로 음의 방향으로 전환합니다. 디폴트 각변위 출력(라인 1)을 보면, 객체가 30 rad만큼 앞으로 회전했다가 –20 rad이 될 때까지 뒤로 되돌아갔습니다. [0, 2*pi]로 각도 래핑 체크박스를 선택할 경우, 출력(라인 2)이 0 rad과 2π rad 사이의 범위에서 유지됩니다.
[0, 2*pi]로 각도 래핑 체크박스를 선택하면, 모델 파라미터와 회전 각도 간의 관계가 복잡한 모델(예: 펌프, 모터)의 개발을 단순화할 수 있습니다.
예제
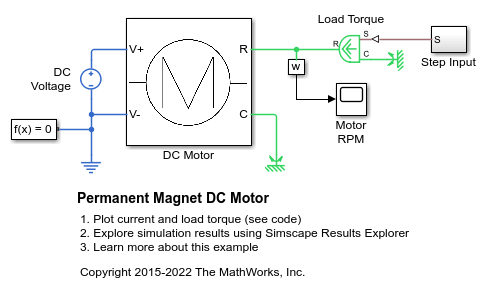
영구 자석 DC 모터
이 예제에서는 테스트 하네스와 Simscape™ 블록을 사용하여 DC 모터의 무부하 속도, 무부하 전류, 스톨 토크에 대한 제조업체 사양을 검증하는 방법을 보여줍니다.

스틱-슬립 운동이 있는 회전 기계 시스템
이 모델은 스틱-슬립 마찰이 있는 회전 기계 시스템을 보여줍니다. 스프링과 댐퍼에 의해 고정점에 관성이 연결됩니다. 이 관성은 스틱-슬립 마찰 요소를 통해 속도 소스로 구동됩니다. 이러한 마찰 요소는 이탈 마찰과 쿨롱 마찰 간의 차이를 가지며, 그 결과 관성의 스틱-슬립 운동이 발생하게 됩니다.