sgolay
사비츠키-골레이 필터(Savitzky-Golay Filter) 설계
설명
예제
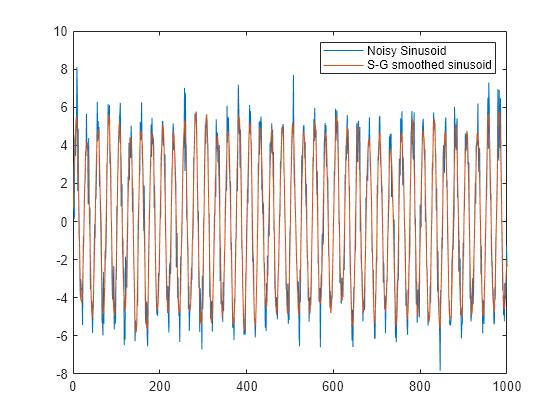
200초 동안 1초에 5회씩 샘플링된, 백색 가우스 잡음이 포함된 0.2Hz 정현파로 구성된 신호를 생성합니다.
dt = 1/5; t = (0:dt:200-dt)'; x = 5*sin(2*pi*0.2*t) + randn(size(t));
sgolay를 사용하여 신호를 평활화합니다. 21개 샘플로 구성된 프레임과 4차 다항식을 사용합니다.
order = 4; framelen = 21; b = sgolay(order,framelen);
b의 중앙 행을 사용하여 신호에 대해 컨벌루션을 수행함으로써 신호의 정상 상태 부분을 계산합니다.
ycenter = conv(x,b((framelen+1)/2,:),'valid');과도를 계산합니다. 시작 과도에는 b의 마지막 행들을 사용하고, 종료 과도에는 b의 첫 번째 행들을 사용합니다.
ybegin = b(end:-1:(framelen+3)/2,:) * x(framelen:-1:1); yend = b((framelen-1)/2:-1:1,:) * x(end:-1:end-(framelen-1));
과도 상태와 정상 상태 부분을 결합하여 완전한 평활화된 신호를 생성합니다. 원래 신호와 사비츠키-골레이 추정값을 플로팅합니다.
y = [ybegin; ycenter; yend]; plot([x y]) legend('Noisy Sinusoid','S-G smoothed sinusoid')
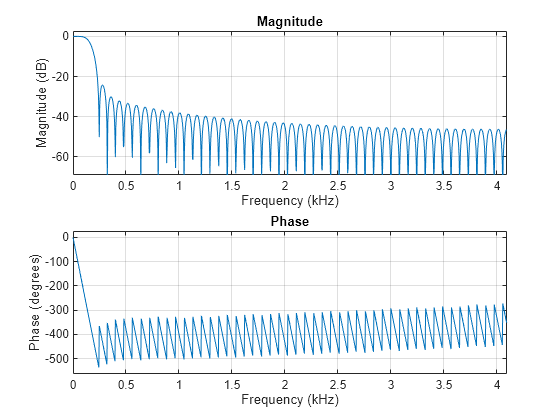
Hz로 샘플링된, 잡음이 있는 신호를 필터링하기 위해 5차 다항식을 사용한 사비츠키-골레이 평활화 필터를 설계합니다. 해밍 윈도우를 사용합니다. 프레임 길이는 101개 샘플입니다.
Fs = 8192; m = 5; fl = 101; weights = hamming(fl); b = sgolay(m,fl,weights);
b의 중앙 행에 대한 주파수 응답을 플로팅합니다. 1024개 FFT 점을 사용합니다.
NFFT = 1024; freqz(b((fl+1)/2,:),1,NFFT,Fs)
벡터 가중치 적용과 신호 필터링 성능에 미치는 영향에 대한 자세한 내용은 Design and Analyze Savitzky-Golay Filters 항목을 참조하십시오.
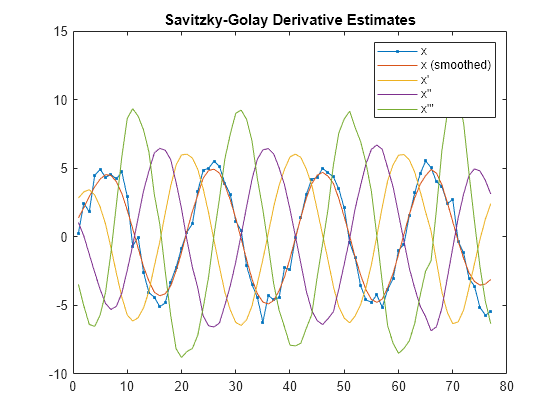
20초 동안 1초에 4회씩 샘플링된, 백색 가우스 잡음이 포함된 0.2Hz 정현파로 구성된 신호를 생성합니다.
dt = 0.25; t = (0:dt:20-1)'; x = 5*sin(2*pi*0.2*t)+0.5*randn(size(t));
사비츠키-골레이 방법을 사용하여 정현파의 처음 세 개 도함수를 추정합니다. 25개 샘플로 구성된 프레임과 5차 다항식을 사용합니다. 열을 dt의 거듭제곱으로 나누어 도함수를 올바르게 스케일링합니다.
[b,g] = sgolay(5,25); dx = zeros(length(x),4); for p = 0:3 dx(:,p+1) = conv(x, factorial(p)/(-dt)^p * g(:,p+1), 'same'); end
원래 신호, 평활화된 시퀀스, 도함수 추정값을 플로팅합니다.
plot(x,'.-') hold on plot(dx) hold off legend('x','x (smoothed)','x''','x''''', 'x''''''') title('Savitzky-Golay Derivative Estimates')
입력 인수
출력 인수
알고리즘
사비츠키-골레이 필터는 주파수 범위의 큰 부분을 차지하는, 잡음이 있는 신호를 평활화하는 데 사용됩니다. 사비츠키-골레이 평활화 필터는 표준 평균 FIR 필터보다 신호의 고주파 성분을 적게 제거하는 경향이 있습니다. 그러나 잡음 수준이 특히 높은 경우 잡음 제거 측면에서는 표준 평균 FIR 필터보다 효율이 떨어집니다.
필터링은 인근 점에서 측정한 값들의 기본적인 수준이 거의 동일하다는 가정하에, 신호의 각 점을 그 점을 중심으로 하는 이동 윈도우에 포함된 신호 값들의 조합으로 대체하여 이루어집니다. 예를 들어, 이동평균 필터는 각 데이터 점을 주변 데이터 점의 국소 평균으로 대체합니다. 주어진 데이터 점의 왼쪽에 점이 k개 있고 오른쪽에 점이 k개 있다면, 이동평균 필터는 총 L = 2k + 1의 윈도우 길이에 대해 다음과 같이 대체합니다.
사비츠키-골레이 필터는 윈도우 내의 신호 값 전체에 대해 n차 다항식을 최소제곱 피팅하고 피팅된 다항식 곡선의 계산된 중심 점을 새로운 평활화된 데이터 점으로 택하여 이 개념을 일반화합니다. 이는 주어진 점 xs에 대해 다음과 같습니다.
또는, 행렬로 표현하면 다음과 같습니다.
사비츠키-골레이 추정값을 구하려면 H의 의사 역행렬을 사용하여 a를 계산하고 결과 앞에 H를 곱합니다.
sgolay는 조건이 나빠지지 않도록 qr 함수를 사용하여 H의 효율적 크기의 분해 H = QR을 계산하며, 이에 따라 B = QQT가 됩니다.
B는 한 번만 계산하면 됩니다. 대부분의 신호 점에 대해 사비츠키-골레이 추정값은 신호를 B의 중앙 행과 컨벌루션하여 얻게 됩니다. 필터링된 신호의 정상 상태 부분이 결과로 반환됩니다. B의 처음 k개 행은 초기 과도 상태의 값을 생성하고 B의 마지막 k개 행은 최종 과도 상태의 값을 생성합니다. 이에 대한 예제는 sgolayfilt 항목을 참조하십시오. 윈도우 길이를 늘려서 잡음 억제를 개선할 수 있지만, 이렇게 하면 모든 과도 상태 근처에서 깁스 현상과 비슷한 링잉 현상이 발생합니다.
참고 문헌
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Englewood Cliffs, NJ: Prentice Hall, 1996.
[2] Press, William H., Saul A. Teukolsky, William T. Vetterling, and Brian P. Flannery. Numerical Recipes in C: The Art of Scientific Computing. New York: Cambridge University Press, 1992.
[3] Schafer, Ronald W. “What Is a Savitzky-Golay Filter? [Lecture Notes].” IEEE Signal Processing Magazine Vol. 28, Number 4, July 2011, pp. 111–117. https://doi.org/10.1109/MSP.2011.941097.
확장 기능
버전 내역
R2006a 이전에 개발됨