cusum
누적합을 사용하여 평균의 미세한 변화 감지
구문
설명
[는 목표 평균에서 위와 아래로 5 표준편차를 벗어나게 변동한, iupper,ilower] = cusum(x)x의 상부 및 하부 누적합에 대한 첫 번째 인덱스를 각각 반환합니다. 감지 가능한 최소 평균 이동은 1 표준편차입니다. 이 함수는 x의 처음 25개 샘플에서 목표 평균과 표준편차를 추정합니다.
[은 상부 및 하부 누적합이 관리 한계를 초과하는 모든 인덱스를 반환합니다.iupper,ilower] = cusum(___,'all')
[은 상부 및 하부 누적합도 반환합니다.iupper,ilower,uppersum,lowersum] = cusum(___)
cusum(___)에 출력 인수를 지정하지 않으면 목표 평균 위와 아래의 1 표준편차로 정규화된 상부 및 하부 누적합을 플로팅합니다.
예제
선형 추세를 갖고 100개 샘플로 구성된 랜덤 신호를 생성하고 플로팅합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다.
rng('default')
rnds = rand(1,100);
trnd = linspace(0,1,100);
fnc = rnds + trnd;
plot(fnc)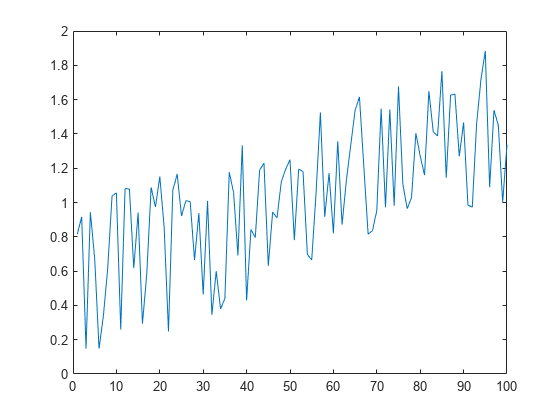
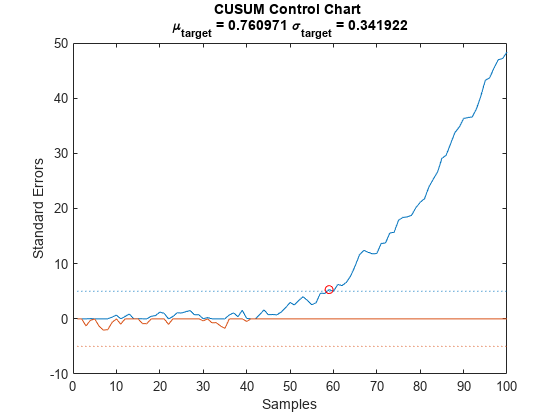
입력 인수의 디폴트 값을 사용하여 cusum을 함수에 적용합니다.
cusum(fnc)
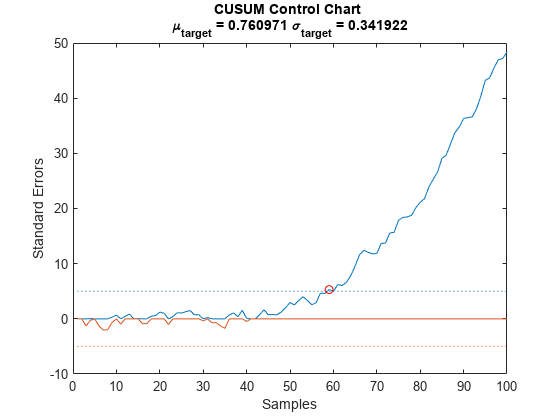
처음 25개 샘플의 평균과 표준편차를 계산합니다. 이러한 수치를 목표 평균과 목표 표준편차로 사용하여 cusum을 적용합니다. 누적합이 목표 평균에서 5 표준편차를 벗어나게 변동하는 점을 강조 표시합니다. 감지 가능한 최소 평균 이동을 1 표준편차로 설정합니다.
mfnc = mean(fnc(1:25)); sfnc = std(fnc(1:25)); cusum(fnc,5,1,mfnc,sfnc)
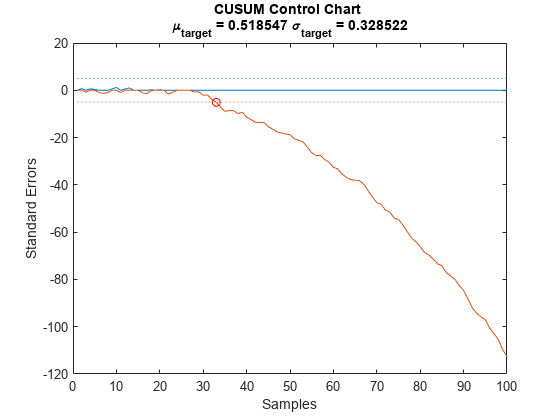
음의 선형 추세를 사용하여 계산을 반복합니다.
nnc = rnds - trnd; cusum(nnc)
마모로 인해 불안정해지는 차축의 움직임과 유사한 신호를 생성합니다. 분산이 1/9인 백색 가우스 잡음을 추가합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다.
rng default
sz = 200;
dr = airy(2,linspace(-14.9371,1.2,sz));
rd = dr + sin(2*pi*(1:sz)/5) + randn(1,sz)/3;점점 커지는 백그라운드 변동과 그 결과로 생성되는 신호를 플로팅합니다.
plot(dr) hold on plot(rd,'.-') hold off

변동과 잡음이 없을 때의 평균과 표준편차를 구합니다. 잡음 없는 이상적인 신호와 그 신호의 안정된 백그라운드를 플로팅합니다.
id = 0.3*sin(2*pi*(1:sz)/20); st = id + sin(2*pi*(1:sz)/5); mf = mean(st)
mf = -3.8212e-16
sf = std(st)
sf = 0.7401
plot(id) hold on plot(st,'.-') hold off

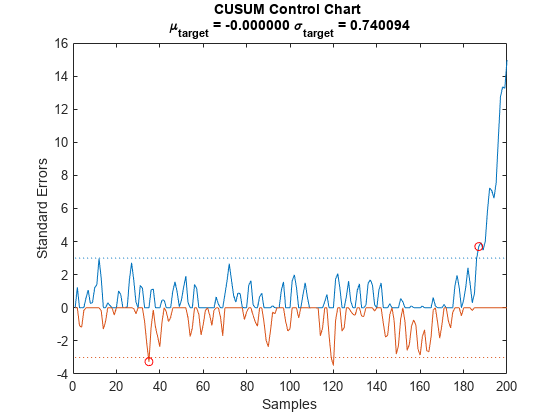
CUSUM 관리도를 사용하여 불안정성이 시작되는 지점을 찾아냅니다. 신호가 이상적인 동작에서 3 표준편차를 벗어난 경우 시스템이 불안정한 것으로 가정합니다. 감지 가능한 최소 이동을 1 표준편차로 지정합니다.
cusum(rd,3,1,mf,sf)
감지 가능한 최소 이동을 증가시켜 위반 기준을 더 엄격하게 합니다. 원치 않는 변동이 발생한 모든 경우를 반환합니다.
cusum(rd,3,1.2,mf,sf,'all')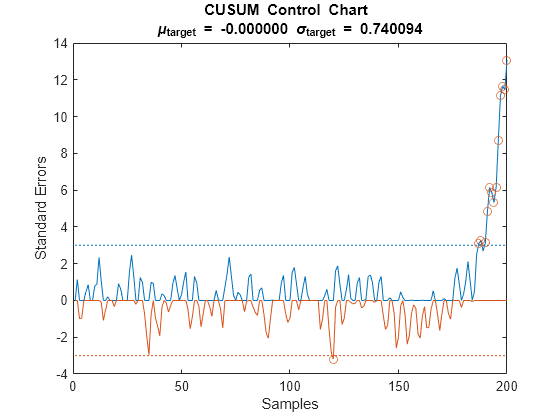
골프장의 각 홀에는 공을 넣는 데 필요한 타수를 나타내는 "par"(파)가 있습니다. 숙련된 선수는 대개 해당 파에 매우 근접한 타수를 기록하며 각 홀을 끝냅니다. 시합에서 확실한 우승자로 부상하려면 여러 홀에서 경기를 하고 점수를 누적해야 합니다.
Ben, Jen, Ken이 18홀로 구성된 전체 1라운드 경기를 합니다. 코스는 par-3, par-4, par-5 홀로 구성되어 있습니다. 경기가 끝나면 선수들이 자신의 점수를 계산합니다.
hole = 1:18;
par = [4 3 5 3 4 5 3 4 4 4 5 3 5 4 4 4 3 4];
nms = {'Ben';'Jen';'Ken'};
Ben = [4 3 4 2 3 5 2 3 3 4 3 2 3 3 3 3 2 3];
Jen = [4 3 4 3 4 4 3 4 4 4 5 3 4 4 5 5 3 3];
Ken = [4 3 4 3 5 5 4 4 4 4 5 3 5 4 5 4 3 5];
T = table(hole',par',Ben',Jen',Ken', ...
'VariableNames',['hole';'par';nms])T=18×5 table
hole par Ben Jen Ken
____ ___ ___ ___ ___
1 4 4 4 4
2 3 3 3 3
3 5 4 4 4
4 3 2 3 3
5 4 3 4 5
6 5 5 4 5
7 3 2 3 4
8 4 3 4 4
9 4 3 4 4
10 4 4 4 4
11 5 3 5 5
12 3 2 3 3
13 5 3 4 5
14 4 3 4 4
15 4 3 5 5
16 4 3 5 4
⋮
끝났을 때 하부 누적합이 par 밑으로 가장 낮은 선수가 라운드의 승자가 됩니다. 우승자를 결정하기 위해 세 선수의 합을 계산합니다. 임계값을 작게 설정하여 모든 평균 이동을 감지 가능하게 합니다.
[~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
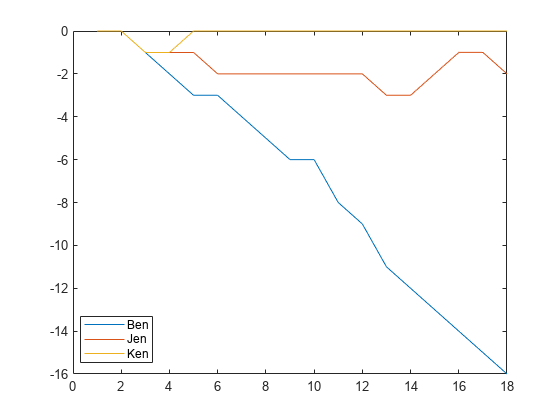
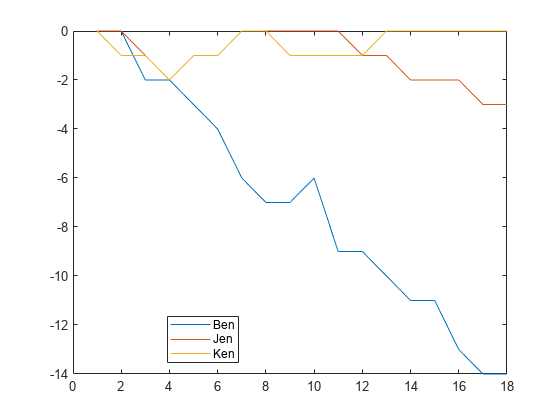
이 라운드에서는 Ben이 우승했습니다. 홀별로 타수를 임의로 추가하거나 빼서 다음 경기를 시뮬레이션합니다.
Ben = Ben+randi(3,1,18)-2; Jen = Jen+randi(3,1,18)-2; Ken = Ken+randi(3,1,18)-2; [~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
입력 인수
출력 인수
세부 정보
확장 기능
버전 내역
R2016a에 개발됨