interpolate
Interpolate states along path from RRT
Description
interpPath = interpolate(rrt,path)rrt.
interpPath = interpolate(rrt,path,numInterp)
Examples
Use the manipulatorRRT object to plan a path for a rigid body tree robot model in an environment with obstacles. Visualize the planned path with interpolated states.
Load a robot model into the workspace. Use the KUKA LBR iiwa© manipulator arm.
robot = loadrobot("kukaIiwa14","DataFormat","row");
Generate the environment for the robot. Create collision objects and specify their poses relative to the robot base. Visualize the environment.
env = {collisionBox(0.5, 0.5, 0.05) collisionSphere(0.3)};
env{1}.Pose(3, end) = -0.05;
env{2}.Pose(1:3, end) = [0.1 0.2 0.8];
show(robot);
hold on
show(env{1})
show(env{2})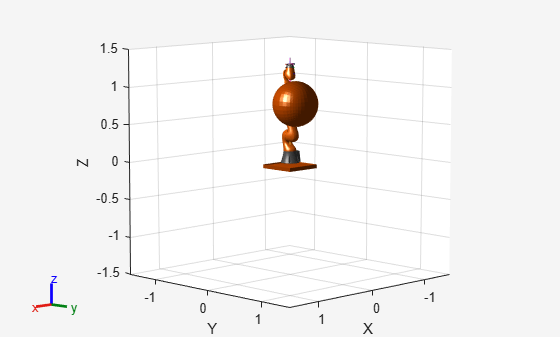
Create the RRT planner for the robot model.
rrt = manipulatorRRT(robot,env);
rrt.SkippedSelfCollisions = "parent";Specify a start and a goal configuration.
startConfig = [0.08 -0.65 0.05 0.02 0.04 0.49 0.04]; goalConfig = [2.97 -1.05 0.05 0.02 0.04 0.49 0.04];
Plan the path. Due to the randomness of the RRT algorithm, set the rng seed for repeatability.
rng(0) path = plan(rrt,startConfig,goalConfig);
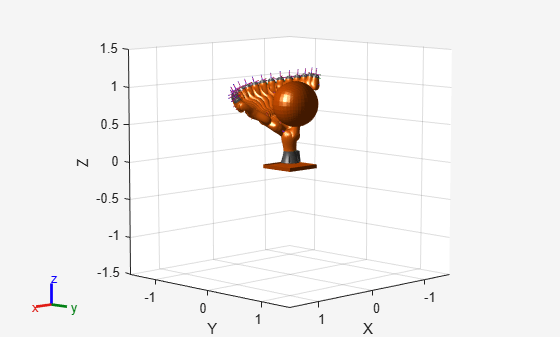
Visualize the path. To add more intermediate states, interpolate the path. By default, the interpolate object function uses the value of ValidationDistance property to determine the number of intermediate states. The for loop shows every 20th element of the interpolated path.
interpPath = interpolate(rrt,path); clf for i = 1:20:size(interpPath,1) show(robot,interpPath(i,:)); hold on end show(env{1}) show(env{2}) hold off