jointSpaceMotionModel
Model rigid body tree motion given joint-space inputs
Description
The jointSpaceMotionModel object models the closed-loop
joint-space motion of a manipulator robot, specified as a rigidBodyTree object. The motion model behavior is defined by the MotionType
property.
For more details about the equations of motion, see Joint-Space Motion Model.
Creation
Syntax
Description
motionModel = jointSpaceMotionModel
motionModel = jointSpaceMotionModel("RigidBodyTree",tree)rigidBodyTree object.
motionModel = jointSpaceMotionModel(Name,Value)
Properties
Object Functions
derivative | Time derivative of manipulator model states |
updateErrorDynamicsFromStep | Update values of NaturalFrequency and
DampingRatio properties given desired step response |
Examples
This example shows how to create and use a jointSpaceMotionModel object for a manipulator robot in joint-space.
Create the Robot
robot = loadrobot("kinovaGen3",DataFormat="column",Gravity=[0 0 -9.81]);
Set Up the Simulation
Set the timespan to be 1 s with a time step size of 0.01 s. Set the initial state to be the robot's home configuration with a velocity of zero.
tspan = 0:0.01:1; initialState = [homeConfiguration(robot); zeros(7,1)];
Define the reference state with a target position, zero velocity, and zero acceleration.
targetState = [pi/4; pi/3; pi/2; -pi/3; pi/4; -pi/4; 3*pi/4; zeros(7,1); zeros(7,1)];
Create the Motion Model
Model the system with computed torque control and error dynamics defined by a moderately fast step response with 5% overshoot.
motionModel = jointSpaceMotionModel(RigidBodyTree=robot); updateErrorDynamicsFromStep(motionModel,0.3,0.05);
Simulate the Robot
Use the derivative function of the model as the input to the ode45 solver to simulate the behavior over 1 second.
[t,robotState] = ode45(@(t,state)derivative(motionModel,state,targetState),tspan,initialState);
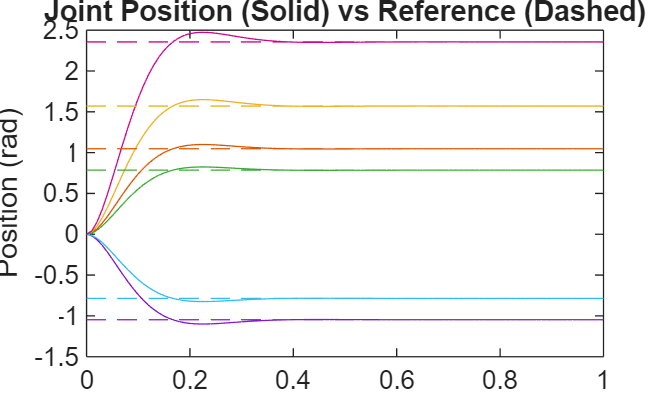
Plot the Response
Plot the positions of all the joints actuating to their target state. Joints with a higher displacement between the starting position and the target position actuate to the target at a faster rate than those with a lower displacement. This leads to an overshoot, but all of the joints have the same settling time.
figure plot(t,robotState(:,1:motionModel.NumJoints)); hold on plot(t,targetState(1:motionModel.NumJoints)*ones(1,length(t)),"--"); title("Joint Position (Solid) vs Reference (Dashed)"); xlabel("Time (s)") ylabel("Position (rad)"); hold off
References
[1] Craig, John J. Introduction to Robotics: Mechanics and Control. Upper Saddle River, NJ: Pearson Education, 2005.
[2] Spong, Mark W., Seth Hutchinson, and Mathukumalli Vidyasagar. Robot Modeling and Control. Hoboken, NJ: Wiley, 2006.