show
Description
show( shows the collision capsule
approximation superimposed on the original collision geometries of the corresponding rigid
body tree in the home configuration of the rigid body tree. capapprox)
show(capapprox,Parent= specifies the
parent axes handle ax)ax to plot capsule-approximated rigid body
tree.
ax = show(capapprox,___)ax containing the capsule-approximated rigid body
tree plot.
Examples
Load a robot into the workspace and visualize it.
robotIRB = loadrobot("abbIrb120");
show(robotIRB);
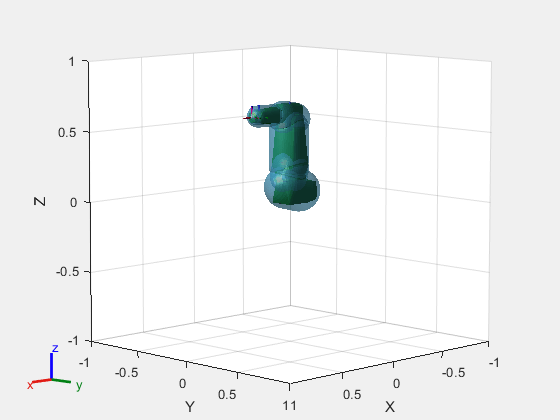
Create a capsule approximation of the robot, and visualize the capsule-approximated robot model.
capsIRB = capsuleApproximation(robotIRB); figure show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));
Use the getCapsules function to see if the end effector, "tool0", has any collision capsules. Because tool0 is just a frame, it has no collision mesh to approximate as a collision capsule.
capsulesTool = getCapsules(capsIRB,"tool0")capsulesTool = 1×0 empty cell array
Add a capsule to tool0, at a position 0.15 meters along the x-axis, with a radius of 0.15 and a length of 0.
addCapsule(capsIRB,"tool0",[0.15 0],trvec2tform([0.15 0 0]))
show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));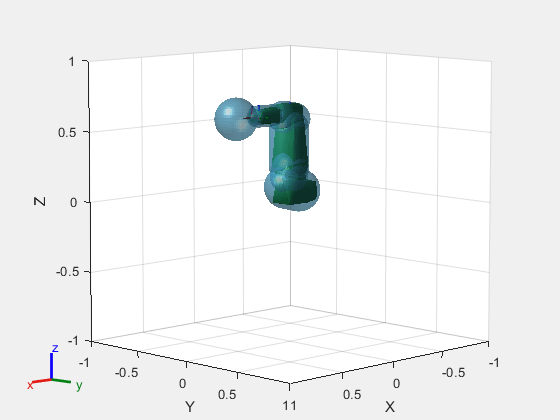
Again check tool0 for a collision capsule, and verify the properties of the detected capsule.
capsulesTool = getCapsules(capsIRB,"tool0")capsulesTool = 1×1 cell array
{1×1 collisionCapsule}
capsulesTool{1}ans =
collisionCapsule with properties:
Radius: 0.1500
Length: 0
Pose: [4×4 double]
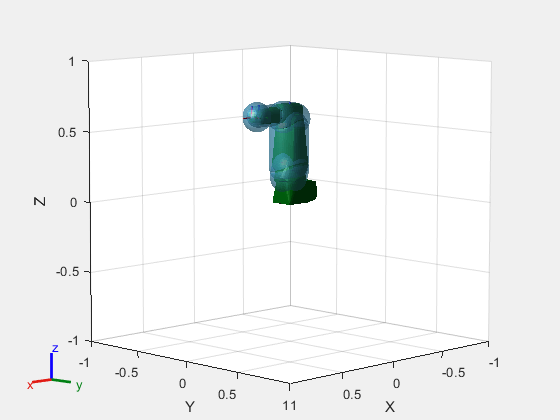
Remove the capsule from the base link. Then, reduce the collision capsule size of tool0, and move it -0.05 meters from the previous position along the x-axis.
removeCapsule(capsIRB,"base_link",1) updatePose(capsIRB,"tool0",trvec2tform([-0.05 0 0]),1) updateGeometry(capsIRB,"tool0",[.1 0.01],1) show(capsIRB,homeConfiguration(capsIRB.RigidBodyTree));
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022b