이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
매니퓰레이터 계획
매니퓰레이터 모션 계획은 로봇의 자유도(DOF)와 로봇 모델의 기구학 제약 조건을 기반으로 고차원 공간에서 경로를 계획하는 작업입니다. 로봇 모델에 대한 기구학 제약 조건은 rigidBodyTree 객체로 지정됩니다. manipulatorRRT를 사용하여 RRT(Rapidly exploring Random Tree) 알고리즘에 기반해 조인트 공간에서 경로를 계획합니다. manipulatorCHOMP를 사용하여 CHOMP(Covariant Hamiltonian Optimization for Motion Planning) 알고리즘에 기반해 충돌 없는 부드러운 궤적을 계획하고 최적화합니다.
함수
도움말 항목
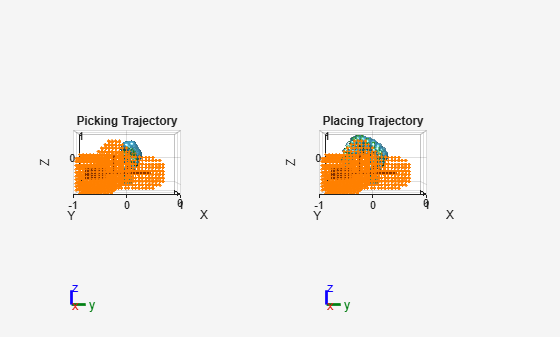
- Pick and Place Using RRT for Manipulators
Using manipulators to pick and place objects in an environment may require path planning algorithms like the rapidly-exploring random tree planner.
- Pick-and-Place Workflow Using RRT Planner and Stateflow for MATLAB
This example shows how to setup an end-to-end pick-and-place workflow for a robotic manipulator like the Kinova® Gen3.
- Pick-and-Place Workflow in Gazebo Using Point-Cloud Processing and RRT Path Planning
Set up an end-to-end, pick-and-place workflow for a robotic manipulator like the KINOVA® Gen3.
- Plan Paths with End-Effector Constraints Using State Spaces for Manipulators
Plan a manipulator robot path using sampling-based planners like the rapidly-exploring random trees (RRT) algorithm.
추천 예제



You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)