시작하기
응용 사례의 최종 목표가 KINOVA Gen3 로봇만을 독립적으로 조작하는 것이라면 matlab_kortex API를 사용한 제어 및 연결 워크플로가 이상적인 솔루션입니다. 그러나 대부분의 로보틱스 사용 사례에서 환경은 다수의 로봇과 센서로 구성되며, 독립적 조작은 흔하지 않습니다. 이러한 시나리오에서는 하드웨어 추상화, 장치 드라이버, 라이브러리, 시각화, 메시지 전달, 패키지 관리 등의 내재된 장점으로 인해 ROS가 널리 사용됩니다.
이 두 인터페이스 간의 비교에 대한 자세한 내용은 Select Interface for Connecting to Kinova Gen3 Robot 항목을 참조하십시오. 지원 패키지에는 로봇의 개별 조인트 각도와 카테시안 자세를 제어하는 예제들이 포함되어 있습니다. 좀 더 고급 수준의 예제에서는 Robotics System Toolbox 기능을 사용하여 3차원 공간에서 매끄러운 궤적을 추적하는 데 필요한 조인트 각도를 계산하는 방법과 로봇이 미리 계산된 궤적을 추적하도록 명령하는 방법을 보여줍니다.
도움말 항목
- Verify Connection to Kinova Gen 3 Robot
Verify network connection to Gen3 robot from MATLAB®.
- Clear Existing Faults
Clear existing faults while working with Gen3 robot.
- Get Latest URDF Robot Model for Kinova Gen3 Robot
Update URDF to the latest version, if required.
- Select Interface for Connecting to Kinova Gen3 Robot
Use either matlab_kortex or ros_kortex for connection.
문제 해결
Troubleshooting Manipulator Support Package
Troubleshoot issues with manipulating Gen3 robot using the support package and understand the limitations.
추천 예제

Connect to Kinova Gen3 Robot and Manipulate the Arm Using MATLAB
Connect Kinova Gen3 7-DoF Ultralightweight Robot to MATLAB to get feedback from it and send control commands.

Track Pre-Computed Trajectory of Kinova Gen3 Robot End-Effector Using Inverse Kinematics and KINOVA KORTEX MATLAB API
Solve inverse kinematics problems and move the Kinova Gen3 7-DoF Ultralightweight Robot arm to follow the desired trajectory.
Generate a Trajectory Using a Set of Waypoints for KINOVA Gen3 Robot End-Effector
Generate and interpolate trajectories for a robot arm from a set of waypoints such as cubic polynomials, quintic polynomials, and trapezoidal trajectories.
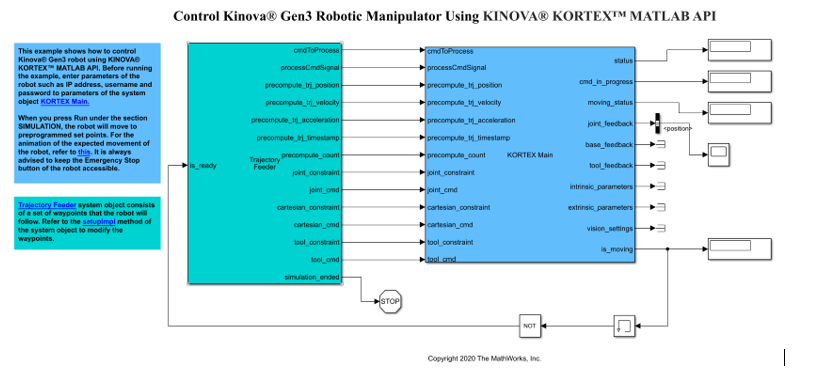
Control KINOVA Gen3 Robotic Manipulator Using KINOVA KORTEX System Object and Simulink
Connect Kinova Gen3 7-DoF Ultralightweight Robot to Simulink® to get feedback from it and send control commands.
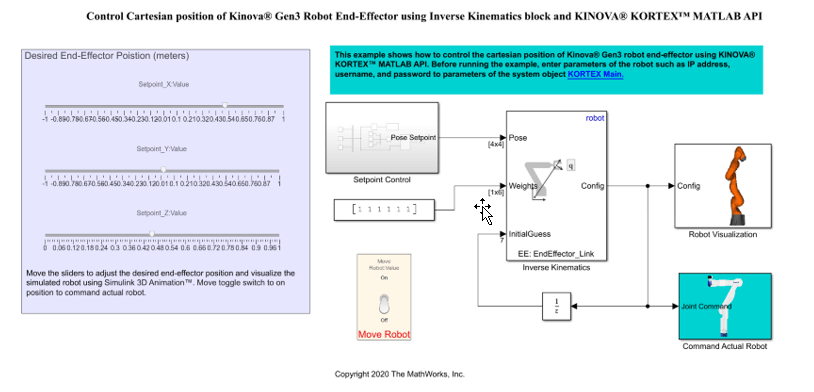
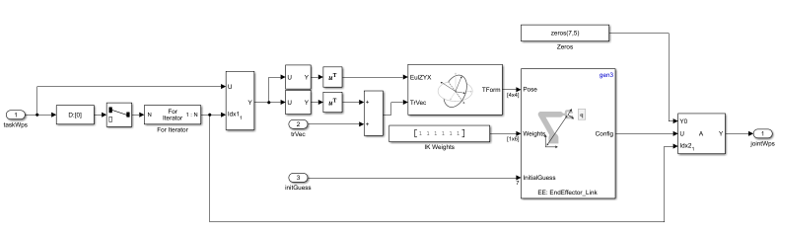
Control Cartesian Position of KINOVA Gen3 Robot End-Effector Using Inverse Kinematics Block and KINOVA KORTEX System Object
Solve inverse kinematics problems using rigid body trees and control KINOVA Gen3 7-DoF Ultralightweight Robot Arm to follow the desired trajectory.

Generate Colorized Point Cloud Using Vision Module of Kinova Gen3 Robot
Connect to Kinova Gen3 7-DoF Ultralightweight Robot cameras and get the RGB and depth streams.

Read Current Joint Angles from KINOVA Gen3 Robot Arm
Connect to KINOVA Gen3 7-DoF Ultralightweight Robot arm with Simulink using Robot Operating System (ROS) to read current joint angles.
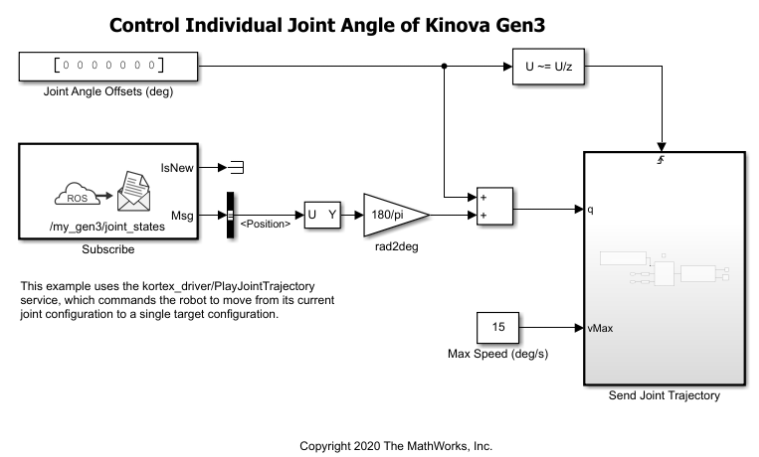
Control Individual Joint Angle of KINOVA Gen3 Robot
Get feedback from KINOVA Gen3 and then send commands to it to reach a particular joint configuration using ROS with Simulink.

Send KINOVA Gen3 Robot Arm to Desired Cartesian Pose
Send KINOVA Gen3 Robot Arm to desired Cartesian pose using ROS with Simulink.
Send Precomputed Trajectory to KINOVA Gen3 Robot Arm
Get feedback from KINOVA Gen3 and then send commands to it to follow a precomputed joint trajectory using ROS with Simulink.