ode89
구문
설명
[입니다. 여기서 t,y] = ode89(odefun,tspan,y0)tspan = [t0 tf]는 t0에서 tf까지의 구간에서 초기 조건 y0을 사용하여 연립미분방정식 를 적분합니다. 해 배열 y의 각 행은 열 벡터 t에 반환된 값에 대응합니다.
모든 MATLAB® ODE 솔버는 형식의 연립방정식이나 질량 행렬이 있는 문제 를 풀 수 있습니다. 솔버는 유사한 구문을 사용합니다. ode23s 솔버는 상수 질량 행렬을 갖는 경우에만 문제를 풀 수 있습니다. ode15s와 ode23t는 특이 질량 행렬을 포함하는 문제(즉, 미분대수 방정식(DAE))를 풀 수 있습니다. odeset의 Mass 옵션을 사용하여 질량 행렬을 지정합니다.
[는 이벤트 함수라고 하는 (t,y)의 함수가 0인 위치를 추가로 찾습니다. 출력값에서 t,y,te,ye,ie] = ode89(odefun,tspan,y0,options)te는 이벤트 발생 시간이고, ye는 이벤트 발생 시 계산된 해이며, ie는 트리거된 이벤트의 인덱스입니다.
각 이벤트 함수에 대해, 0에서 적분을 종료할지 여부와 영점교차의 방향을 고려할지 여부를 지정합니다. 이를 수행하려면 odeset의 'Events' 옵션을 함수(예: myEventFcn 또는 @myEventFcn)로 설정하고 대응 함수 [value,isterminal,direction] = myEventFcn(t,y)를 생성합니다. 자세한 내용은 ODE 이벤트 위치 항목을 참조하십시오.
sol = ode89(___)deval과 함께 사용하여 구간 [t0 tf] 내의 임의의 점에서 해를 계산할 수 있는 구조체를 반환합니다. 위에 열거된 구문에 나와 있는 입력 인수를 원하는 대로 조합하여 사용할 수 있습니다.
예제
단일 해 성분을 갖는 단순한 ODE는 솔버 호출 시 익명 함수로 지정할 수 있습니다. 익명 함수는 입력값 중 하나가 함수에 사용되지 않는 경우에도 두 입력값 (t,y)를 모두 받아야 합니다.
다음 ODE를 풉니다.
시간 구간 [0 5]와 초기 조건 y0 = 0을 지정합니다.
tspan = [0 5]; y0 = 0; [t,y] = ode89(@(t,y) 2*t, tspan, y0);
해를 플로팅합니다.
plot(t,y,'-o')
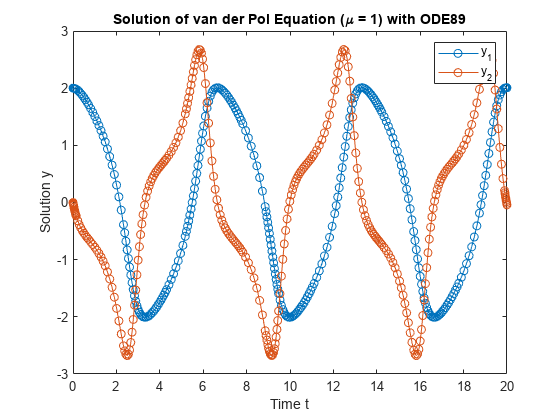
반데르폴 방정식은 2계 ODE입니다.
여기서 는 스칼라 파라미터입니다. 대입 를 수행하여 이 방정식을 연립 1계 ODE로 재작성합니다. 결과로 생성되는 1계 연립 ODE는 다음과 같습니다.
함수 파일 vdp1.m은 를 사용하여 반데르폴 방정식을 나타냅니다. 변수 와 는 요소를 2개 가진 벡터 dydt의 항목 y(1)과 y(2)에 해당합니다.
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
초기값 [2 0]을 사용하고 시간 구간 [0 20]에 대해 ode89 함수를 사용하여 ODE를 풉니다. 결과로 생성되는 출력값은 시간 지점 t로 구성된 열 벡터와 해 배열 y입니다. y의 각 행은 t의 해당 행에 반환된 시간에 대응됩니다. y의 첫 번째 열은 에 대응되고, 두 번째 열은 에 대응됩니다.
[t,y] = ode89(@vdp1,[0 20],[2; 0]);
t에 대해 와 의 해를 플로팅합니다.
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE89'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
ode89는 두 개의 입력 인수 t와 y를 사용하는 함수에만 동작합니다. 하지만, 함수 외부에 추가 파라미터를 정의하고 함수 핸들을 지정할 때 이를 전달하는 방식으로 추가 파라미터를 전달할 수 있습니다.
다음 ODE를 풉니다.
방정식을 1계 시스템으로 다시 작성하면 다음 결과가 생성됩니다.
이 예시의 끝에 나와 있는 로컬 함수 odefcn은 이 연립방정식을 4개의 입력 인수 t, y, A, B를 받는 함수로 나타냅니다.
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
ode89를 사용하여 ODE를 풉니다. A와 B의 미리 정의된 값을 odefcn에 전달하도록 함수 핸들을 지정합니다.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode89(@(t,y) odefcn(t,y,A,B), tspan, y0);
결과를 플로팅합니다.
plot(t,y(:,1),'-o',t,y(:,2),'-.')

function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
ode45에 비해 ode113, ode78, ode89 솔버가 엄격한 허용오차를 갖는 문제를 푸는 데 더 효과적입니다. 보통 이러한 솔버가 탁월한 성능을 보이는 경우는 해 곡선이 매끄럽고 솔버의 각 스텝에서 높은 정확성을 요하는 궤도 역학 문제를 다룰 때입니다.
2체 문제(Two-body problem)는 공통의 평면을 선회하는 두 개의 상호 작용하는 물체 m1과 m2가 있다고 가정합니다. 이 예제에서는 한 물체가 다른 물체보다 훨씬 더 큽니다. 무거운 물체가 원점에 있는 경우 운동 방정식은 다음과 같습니다.
여기서
이 문제를 풀려면, 먼저 다음과 같이 대입을 사용하여 4개의 1계 ODE로 이루어진 시스템으로 변환해야 합니다.
이러한 대입을 마치면 다음과 같은 1계 시스템이 생성됩니다.
이 예시의 끝에 포함된 로컬 함수 twobodyode는 2체 문제에 대한 연립방정식을 작성합니다.
function dy = twobodyode(t,y) % Two-body problem with one mass much larger than the other. r = sqrt(y(1)^2 + y(3)^2); dy = [y(2); -y(1)/r^3; y(4); -y(3)/r^3]; end
ode89를 사용하여 연립 ODE를 풉니다. RelTol에는 1e-13, AbsTol에는 1e-14의 엄격한 허용오차를 지정합니다.
opts = odeset('Reltol',1e-13,'AbsTol',1e-14,'Stats','on'); tspan = [0 10*pi]; y0 = [2 0 0 0.5]; [t,y] = ode89(@twobodyode, tspan, y0, opts);
243 successful steps 0 failed attempts 5103 function evaluations
plot(t,y) legend('x','x''','y','y''','Location','SouthEast') title('Position and Velocity Components')
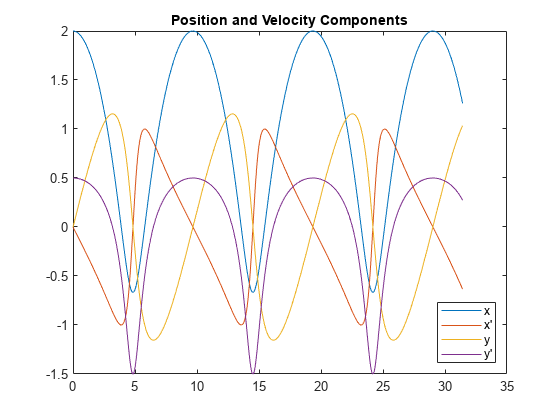
figure plot(y(:,1),y(:,3),'-o',0,0,'ro') axis equal title('Orbit of Smaller Mass')

ode45에 비해 ode89 솔버는 더 적은 횟수의 스텝과 함수 계산을 수행하여 더욱 빠르게 해를 구할 수 있습니다.
function dy = twobodyode(t,y) % Two-body problem with one mass much larger than the other. r = sqrt(y(1)^2 + y(3)^2); dy = [y(2); -y(1)/r^3; y(4); -y(3)/r^3]; end
입력 인수
출력 인수
알고리즘
ode89는 Verner의 "가장 견고한" 룽게-쿠타 9(8) 쌍을 8차 연속적 확장으로 구현한 것입니다. 이 해는 9차까지 일반화됩니다. 8차 연속적 확장은 5번의 추가적인 odefun 계산이 필요하지만 보간이 필요한 스텝에서만 계산됩니다.
참고 문헌
[1] Verner, J. H. “Numerically Optimal Runge–Kutta Pairs with Interpolants.” Numerical Algorithms 53, no. 2–3 (March 2010): 383–396. https://doi.org/10.1007/s11075-009-9290-3.
확장 기능
버전 내역
R2021b에 개발됨