findobj
특정 속성을 가진 그래픽스 객체 찾기
구문
설명
h = findobj는 그래픽스 root 객체와 그래픽스 root 객체의 모든 후손을 반환합니다.
h = findobj(은 계층 구조에서 지정된 속성이 지정된 값으로 설정된 모든 객체를 반환합니다. prop1,value1,...,propN,valueN)prop,value 쌍을 위에 열거된 구문의 다른 입력 인수 조합으로 바꿀 수 있습니다. 예를 들어, h = findobj(prop1,value1,'-not',prop2,value2,'-property',prop3)은 다음 세 가지 조건을 충족하는 모든 객체를 반환합니다.
객체의
prop1속성값이value1로 설정됨.객체의
prop2속성값이value2로 설정되지 않음.객체가
prop3속성을 가짐.
h = findobj(는 objhandles,___) objhandles에 나열된 객체와 각 객체의 모든 후손으로 검색을 제한합니다. 위에 열거된 모든 구문에 대해 검색을 제한할 수 있습니다.
h = findobj(는 objhandles,'-depth',d,___)objhandles에 나열된 객체이고 그래픽스 객체 계층 구조에서 최대 d 수준까지의 후손 객체로 검색을 제한합니다.
h = findobj(은 objhandles,'flat',___) objhandles에 나열된 객체로 검색을 제한합니다. 후손 객체는 검색하지 않습니다. 'flat' 옵션을 사용하는 것은 '-depth' 옵션을 d = 0과 함께 사용하는 것과 동일합니다.
예제
모든 기존 Figure를 삭제한 다음 임의 난수 값의 플롯을 만듭니다.
close all
plot(rand(5))
그래픽스 root 객체와 그래픽스 root 객체의 모든 후손을 반환합니다.
h = findobj
h = 8×1 graphics array: Root Figure (1) Axes Line Line Line Line Line
모든 기존 Figure를 삭제한 다음 여러 선으로 구성된 플롯을 만듭니다.
close all
plot(magic(4))
모든 line 객체를 반환합니다.
h = findobj('Type','line')
h = 4×1 Line array: Line Line Line Line
사용자 지정 색과 선 스타일을 갖는 9개의 사인파를 플로팅합니다.
x = linspace(0,7); y = ones(length(x),9); for i = 1:9 y(:,i) = sin(x-i/5)'; end plot(x,y) colororder({'red','green','blue'}) ax = gca; ax.LineStyleOrder = {'-','--',':'};
빨간색 실선을 반환합니다. 그런 다음 선의 두께를 변경합니다.
h = findobj('Color','red','LineStyle','-')
h =
Line with properties:
Color: [1 0 0]
LineStyle: '-'
LineWidth: 0.5000
Marker: 'none'
MarkerSize: 6
MarkerFaceColor: 'none'
XData: [0 0.0707 0.1414 0.2121 0.2828 0.3535 0.4242 0.4949 0.5657 0.6364 0.7071 0.7778 0.8485 0.9192 0.9899 1.0606 1.1313 1.2020 1.2727 1.3434 1.4141 1.4848 1.5556 1.6263 1.6970 1.7677 1.8384 1.9091 1.9798 2.0505 2.1212 … ] (1×100 double)
YData: [-0.1987 -0.1289 -0.0586 0.0121 0.0827 0.1529 0.2224 0.2907 0.3576 0.4226 0.4856 0.5462 0.6040 0.6588 0.7103 0.7582 0.8024 0.8426 0.8785 0.9101 0.9371 0.9594 0.9769 0.9896 0.9973 1.0000 0.9977 0.9905 0.9782 0.9611 … ] (1×100 double)
Show all properties
h.LineWidth = 2;

여러 선으로 구성된 플롯을 만듭니다. 각 플롯에 대해 식별자를 지정합니다.
x = linspace(-1,1); y1 = x; plot(x,y1,'Tag','linear') hold on y2 = x.^2; plot(x,y2,'Tag','quadratic') y3 = exp(x); plot(x,y3,'Tag','exponential') y4 = sin(x); plot(x,y4,'Tag','sinusoidal') hold off
Tag 속성이 'linear'로 설정되지 않은 모든 객체를 찾습니다.
h1 = findobj('-not','Tag','linear')
h1 = 6×1 graphics array: Root Figure (1) Axes Line (sinusoidal) Line (exponential) Line (quadratic)
Tag 속성이 'linear' 또는 'quadratic'으로 설정되지 않은 모든 객체를 찾습니다.
h2 = findobj('-not',{'Tag','linear','-or','Tag','quadratic'})
h2 = 5×1 graphics array: Root Figure (1) Axes Line (sinusoidal) Line (exponential)
Tag 속성이 'linear' 또는 'quadratic'으로 설정되지 않은 모든 line 객체를 찾습니다.
h3 = findobj('Type','line','-not',{'Tag','linear','-or','Tag','quadratic'})
h3 = 2×1 Line array: Line (sinusoidal) Line (exponential)
'-and'와 중괄호를 사용하여 위 명령문의 가독성을 높입니다.
h4 = findobj({'Type','line'},'-and',{'-not',{'Tag','linear','-or','Tag','quadratic'}})h4 = 2×1 Line array: Line (sinusoidal) Line (exponential)
3개의 선 플롯을 만들고 2개의 플롯에 식별자를 할당합니다.
x = linspace(-1,1); y1 = x; plot(x,y1) hold on y2 = x.^2; plot(x,y2,'Tag','Quadratic') y3 = exp(x); plot(x,y3,'Tag','Exponential') hold off

Tag 속성이 비어 있지 않은 모든 객체를 찾습니다.
h = findobj('-regexp','Tag','[^'']')
h = 2×1 Line array: Line (Exponential) Line (Quadratic)
4개의 값으로 구성된 벡터를 만듭니다. 선 플롯, 영역 플롯 및 막대 그래프를 사용하여 값을 표시합니다.
y = [1 5 6 3]; subplot(3,1,1) plot(y) subplot(3,1,2) area(y) subplot(3,1,3) bar(y)
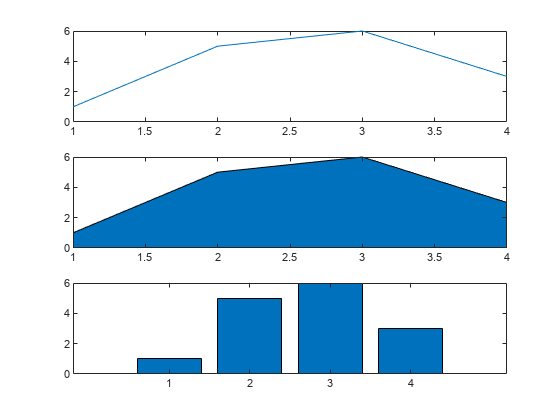
BaseValue 속성을 갖는 모든 객체를 반환합니다.
h = findobj('-property','BaseValue')
h = 2×1 graphics array: Bar Area
난수 값의 플롯을 만든 다음 현재 좌표축에 있는 모든 line 객체를 반환합니다.
plot(rand(5))
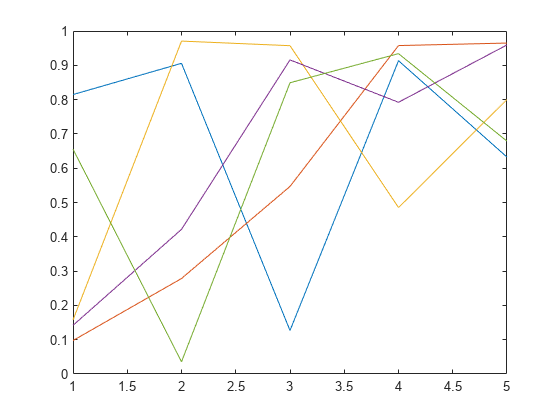
h = findobj(gca,'Type','line')
h = 5×1 Line array: Line Line Line Line Line
h를 사용하여 첫 번째 Line 객체의 y 값을 쿼리합니다.
values = h(1).YData
values = 1×5
0.6557 0.0357 0.8491 0.9340 0.6787
2개의 탭이 있는 Figure를 만듭니다. 탭마다 부모 컨테이너를 지정하여 각 탭에 좌표축을 추가합니다. 첫 번째 탭에 선을 플로팅하고 두 번째 탭에 곡면을 표시합니다.
figure tab1 = uitab('Title','Tab1'); ax1 = axes(tab1); plot(ax1,1:10) tab2 = uitab('Title','Tab2'); ax2 = axes(tab2); surf(ax2,peaks)

현재 Figure에 있는 모든 객체와 그 후손을 반환합니다.
h = findobj(gcf)
h = 8×1 graphics array: Figure (1) TabGroup Tab (Tab1) Tab (Tab2) Axes Axes Line Surface
2개의 누적 서브플롯이 있는 Figure를 만듭니다.
subplot(2,1,1) x = linspace(0,10); y1 = sin(x); plot(x,y1) subplot(2,1,2) y2 = sin(5*x); plot(x,y2)

현재 Figure에 있는 모든 객체와 그 자식을 찾습니다.
h1 = findobj(gcf,'-depth',1)h1 = 3×1 graphics array: Figure (1) Axes Axes
현재 Figure에 있는 모든 객체와 그래픽스 객체 계층 구조에서 최대 두 수준까지의 후손 객체를 찾습니다.
h2 = findobj(gcf,'-depth',2)h2 = 5×1 graphics array: Figure (1) Axes Axes Line Line
'flat' 옵션을 사용하여 현재 Figure와 현재 좌표축으로 검색을 제한합니다.
h3 = findobj([gcf,gca],'flat')h3 = 2×1 graphics array: Figure (1) Axes
입력 인수
팁
객체의
HandleVisibility속성이'off'로 설정되면findobj는 해당 그래픽스 객체나 그 후손 어떤 것도 반환하지 않습니다. 숨겨진 객체를 포함하여 계층 구조에 있는 모든 객체를 반환하려면findall함수를 사용하십시오.findobj는 모든 올바른 속성값과 정확히 일치하는 객체를 검색합니다. 예를 들어, 다음 구문은Color속성이red,r또는[1 0 0]으로 설정된 객체를 모두 찾습니다.findobj('Color','r')
그래픽스 객체가
objhandles에서 식별된 여러 객체의 후손인 경우 MATLAB은findobj가 해당 핸들을 발견할 때마다 이 그래픽스 객체를 검색합니다. 따라서 그래픽스 객체에 대한 묵시적 참조로 해당 객체가 여러 번 반환될 수 있습니다.
버전 내역
R2006a 이전에 개발됨