dde23
상수 지연(Constant Delay)의 지연 미분 방정식(DDE) 풀기
설명
예제
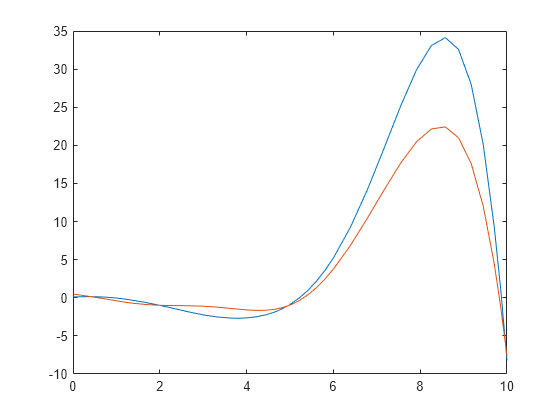
지연 미분 연립방정식을 풉니다.
,
여기서 는 상수 해 내역 을 갖고 는 에 대한 상수 해 내역 를 갖습니다. 에 적용된 시간 지연은 2이고 에 적용된 시간 지연은 1입니다.
DDE 시스템을 ddefun이라는 로컬 함수로 정의합니다.
function dydt = ddefun(t,y,Z) ydelay1 = Z(:,1); ydelay2 = Z(:,2); dydt = [-2*ydelay1(1) + y(2); y(1) - 2*ydelay2(2)]; end
적분 구간을 [0 10]으로, 시간 지연을 벡터 [2; 1]로, 해 내역을 벡터 [0.1; 0.5]로 지정합니다. dde23을 사용하여 DDE를 풉니다.
tspan = [0 10]; delays = [2; 1]; history = [0.1; 0.5]; sol = dde23(@ddefun,delays,history,tspan);
결과를 플로팅합니다.
plot(sol.x,sol.y)
DDE를 풉니다.
,
여기서 에 대해 입니다.
DDE를 ddefun이라는 로컬 함수로 정의합니다.
function dydt = ddefun(t,y,ydelay) dydt = -2*ydelay*(1+y); end
해 내역을 history라는 로컬 함수로 정의합니다.
function h = history(t) h = t; end
ddeset 함수로 적분기 options 구조체의 Events 필드를 지정하여 적분을 종료하지 않고 방정식의 영점을 찾습니다.
function [position,isterminal,direction] = zeroEventsFcn(t,y,ydelay) position = y(1); isterminal = 0; direction = 0; end opts = ddeset(Events=@zeroEventsFcn);
적분 구간을 [0 10]으로, 시간 지연을 1로 지정합니다. 그런 다음 dde23을 사용하여 DDE를 풉니다.
tspan = [0 10]; delays = 1; sol = dde23(@ddefun,delays,@history,tspan,opts);
결과와 영점교차의 위치를 플로팅합니다.
plot(sol.x,sol.y,sol.xe,sol.ye,"o")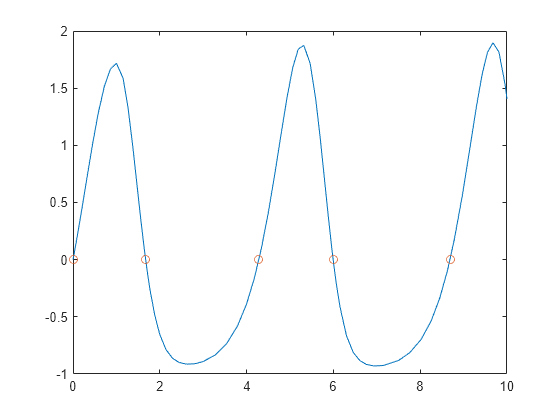
입력 인수
출력 인수
알고리즘
dde23은 명시적 룽게-쿠타(Explicit Runge-Kutta) (2,3) 쌍과 ode23의 보간법을 사용하여 불연속 자취를 추적하고 적분합니다. 또한 시간 지연보다 긴 스텝의 반복을 사용합니다.
참고 문헌
[1] Shampine, Lawrence F., and S. Thompson. "Solving DDEs in MATLAB." Applied Numerical Mathematics 37, no. 4 (June 2001): 441–458. https://doi.org/10.1016/S0168-9274(00)00055-6.
[2] Kierzenka, Jacek. "Tutorial on Solving DDEs with DDE23." MATLAB Central File Exchange. Updated September 1, 2016. https://www.mathworks.com/matlabcentral/fileexchange/3899-tutorial-on-solving-ddes-with-dde23.
[3] Willé, David R., and Christopher T. H. Baker. "DELSOL—a Numerical Code for the Solution of Systems of Delay-Differential Equations." Applied Numerical Mathematics 9, no. 3 (April 1992): 223–234. https://doi.org/10.1016/0168-9274(92)90017-8.
버전 내역
R2006a 이전에 개발됨