findPose
Syntax
Description
absPose = findPose(___,localMapSize)localMapSize, the function uses a map size defined by the
x, y, and z spatial extents of
all the input points enlarged on all sides by a spatial radius,
SearchRadius, centered around the estimated absolute pose
absPose.
[
returns the optimized relative pose.absPose,optimizedRelPose] = findPose(___)
[
returns the root mean squared error of the Euclidean distance between the aligned points.
Lower values indicate a more accurate alignment.absPose,optimizedRelPose,rmse] = findPose(___)
[___] = findPose(___,Name=Value) specifies
options using one or more name-value arguments in addition to any combination of arguments
from previous syntaxes. For example, SearchRadius=4 sets the search
radius for point matching to 4.
Examples
Create a map to store LOAM feature points.
voxelSize = 0.1; loamMap = pcmaploam(voxelSize);
Create a velodyneFileReader object to read point cloud data.
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
Read the first point cloud into the workspace.
ptCloud1 = readFrame(veloReader,1);
Detect LOAM feature points.
points1 = detectLOAMFeatures(ptCloud1);
Downsample the less planar surface points to improve registration speed.
gridStep = 1; points1 = downsampleLessPlanar(points1,gridStep);
Add the LOAM points of the first point cloud to the map.
absPose = rigidtform3d; addPoints(loamMap,points1,absPose)
Read the fifth point cloud, and detect the LOAM feature points in it.
ptCloud2 = readFrame(veloReader,5); points2 = detectLOAMFeatures(ptCloud2);
Downsample the less planar surface points.
points2 = downsampleLessPlanar(points2,gridStep);
Get a relative pose estimate by using the pcregisterloam function.
relPose = pcregisterloam(points2,points1);
Find the absolute pose of the points from the fifth point cloud in the map.
absPose = findPose(loamMap,points2,relPose);
Add the points from the fifth point cloud to the map.
addPoints(loamMap,points2,absPose)
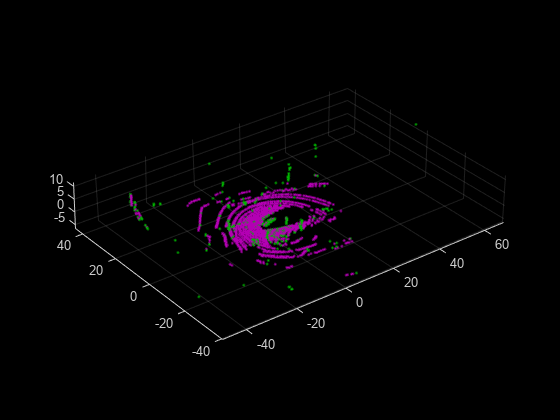
Visualize the map.
figure show(loamMap,MarkerSize=20)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022b