imbilatfilt
가우스 커널을 사용한 영상 양방향 필터링
구문
설명
J = imbilatfilt(I,degreeOfSmoothing)degreeOfSmoothing의 값이 작으면, imbilatfilt는 분산이 작은 이웃(균일한 영역)을 평활화하지만 강한 경계와 같이 분산이 큰 이웃은 평활화하지 않습니다. degreeOfSmoothing의 값이 증가하면 imbilatfilt는 균일한 영역 및 분산이 더 큰 이웃을 모두 평활화합니다.
J = imbilatfilt(I,degreeOfSmoothing,spatialSigma)spatialSigma도 지정합니다. spatialSigma의 값이 클수록 더 먼 이웃 픽셀의 비중이 커져 사실상 이웃 크기가 늘어납니다.
J = imbilatfilt(___,Name=Value)
예제
회색조 영상을 읽어 들이고 표시합니다. 하늘 영역에서 가로 방향의 줄무늬 아티팩트가 관찰됩니다.
I = imread('cameraman.tif');
imshow(I)
하늘 영역의 영상 패치를 검사합니다. 잡음 분산을 근사하는 패치 분산을 계산합니다.
patch = imcrop(I,[170, 35, 50 50]); imshow(patch)
patchVar = std2(patch)^2;
양방향 필터링을 사용하여 영상을 필터링합니다. 평활화 정도를 잡음 분산보다 크게 설정합니다.
DoS = 2*patchVar;
J = imbilatfilt(I,DoS);
imshow(J)
title(['Degree of Smoothing: ',num2str(DoS)])
줄무늬 아티팩트가 줄었지만 완전히 제거되지는 않았습니다. 평활화를 향상하려면 spatialSigma의 값을 2로 늘리십시오. 그러면 가우스 평활화 커널에서 먼 이웃 픽셀의 비중이 커집니다. 그러면 양방향 필터의 공간 범위가 사실상 늘어납니다.
K = imbilatfilt(I,DoS,2); imshow(K) title(['Degree of Smoothing: ',num2str(DoS),', Spatial Sigma: 2'])
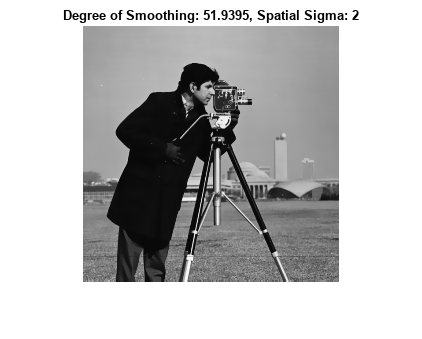
하늘의 줄무늬 아티팩트가 성공적으로 제거되었습니다. 사람의 실루엣 같은 뚜렷한 경계의 선명한 정도나 영상 전경의 풀처럼 텍스처가 있는 영역은 그대로 유지되어 있습니다.
RGB 영상을 읽어 들입니다.
imRGB = imread("coloredChips.png");
imshow(imRGB)
양방향 필터가 지각적으로 유사한 색을 평활화하도록 영상을 L*a*b* 컬러스페이스로 변환합니다.
imLAB = rgb2lab(imRGB);
뚜렷한 경계를 포함하고 있지 않은 영역의 패치를 추출합니다. L*a*b* 컬러스페이스에서 원점으로부터의 유클리드 거리의 분산을 계산합니다.
patch = imcrop(imLAB,[34,71,60,55]); patchSq = patch.^2; edist = sqrt(sum(patchSq,3)); patchVar = std2(edist).^2;
양방향 필터링을 사용하여 L*a*b* 컬러스페이스에서 영상을 필터링합니다. DegreeOfSmoothing을 패치의 분산보다 높은 값으로 설정합니다.
DoS = 2*patchVar; smoothedLAB = imbilatfilt(imLAB,DoS);
영상을 다시 RGB 컬러스페이스로 변환하고 평활화된 영상을 표시합니다.
smoothedRBG = lab2rgb(smoothedLAB,"Out","uint8"); montage({imRGB,smoothedRBG}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS))
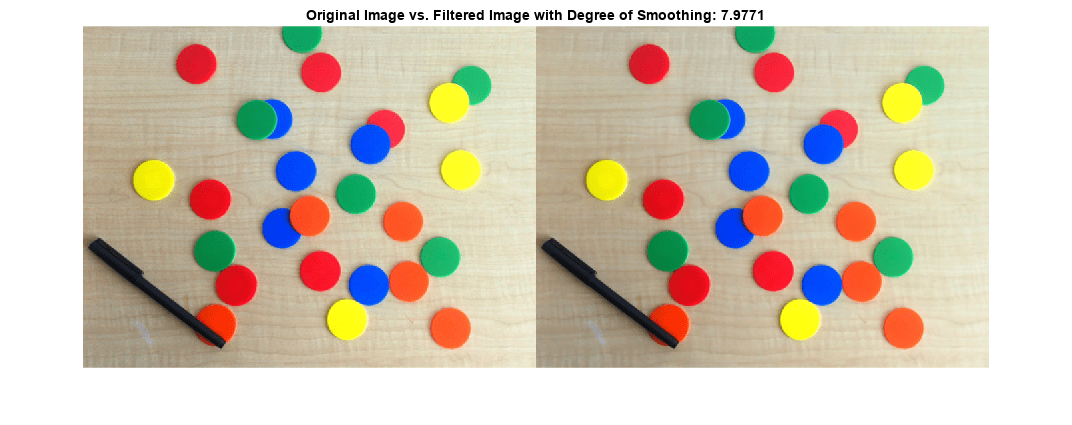
칩과 검정 펜에서는 색이 더 균일하게 나타나지만, 테이블에서는 가로 방향의 입자가 여전히 보입니다. 필터의 유효 이웃이 가로 방향 입자 사이의 공간(이 거리는 대략 7픽셀)을 포함하도록 필터의 공간 범위를 늘립니다. 이 영역을 더 과감하게 평활화하기 위해 DegreeOfSmoothing도 더 크게 합니다.
DoS2 = 4*patchVar; sigma = 7; smoothedLAB2 = imbilatfilt(imLAB,DoS2,sigma); smoothedRBG2 = lab2rgb(smoothedLAB2,"Out","uint8"); montage({imRGB,smoothedRBG2}) title("Original Image vs. Filtered Image with Degree of Smoothing: "+num2str(DoS)+ ... " and Spatial Sigma: "+sigma)
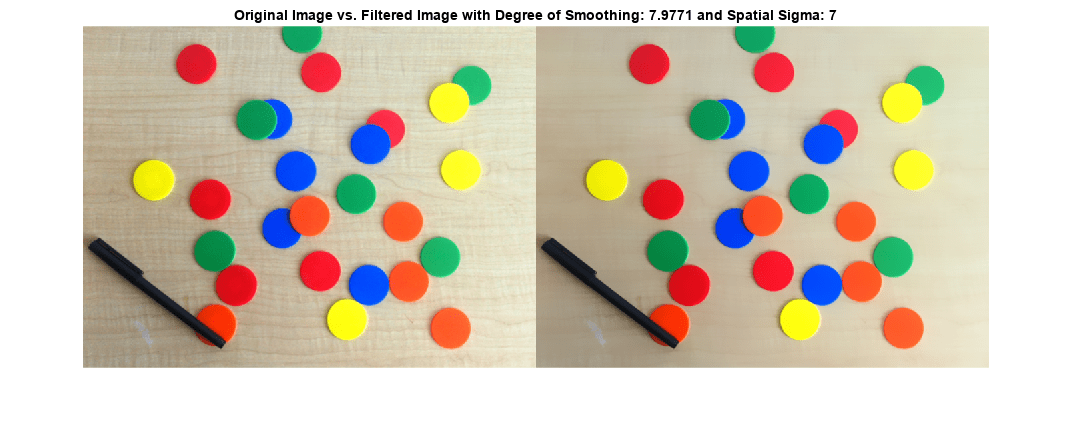
이웃과 평활화 정도를 더 크게 하니까 목재 테이블의 색이 더 균일해졌습니다. 칩과 펜의 경계 선명도는 그대로 유지되어 있습니다.
입력 인수
이름-값 인수
출력 인수
팁
degreeOfSmoothing의 값은 양방향 필터에서 범위 가우스 커널의 분산에 해당합니다 [1]. 픽셀 값과 이웃의 값 사이의 유클리드 거리에 범위 가우스가 적용됩니다.RGB 영상에서 지각적으로 가까운 색을 평활화하려면 양방향 필터를 적용하기 전에
rgb2lab을 사용하여 영상을 CIE L*a*b* 공간으로 변환하십시오. 결과를 보려면lab2rgb를 사용하여 필터링된 영상을 RGB로 변환하십시오.spatialSigma를 크게 하면NeighborhoodSize가 커지며, 이로 인해 필터 실행 시간이 늘어납니다.NeighborhoodSize를 더 작은 값으로 지정하면 정확도는 낮아지지만, 실행 시간이 단축됩니다.
참고 문헌
[1] Tomasi, C., and R. Manduchi. "Bilateral Filtering for Gray and Color Images". Proceedings of the 1998 IEEE® International Conference on Computer Vision. Bombay, India. Jan 1998, pp. 836–846.
확장 기능
버전 내역
R2018a에 개발됨참고 항목
imdiffusefilt | imgaussfilt | imguidedfilter | imfilter | nlfilter | locallapfilt | imnlmfilt