locallapfilt
영상의 고속 국소 라플라시안 필터링
구문
설명
예제
RGB 영상 가져오기
A = imread('peppers.png');0.4보다 작은 세부 묘사를 향상시키려면 필터의 파라미터를 설정하십시오.
sigma = 0.4; alpha = 0.5;
고속 국소 라플라시안 필터링 사용
B = locallapfilt(A, sigma, alpha);
원본 영상과 필터링된 영상을 나란히 표시합니다.
imshowpair(A, B, 'montage')
국소 라플라시안 필터링은 많은 연산이 필요한 알고리즘입니다. locallapfilt가 명암 범위를 'NumIntensityLevels' 파라미터가 정의하는 여러 샘플로 이산화하여 알고리즘을 근사하면 처리 속도가 높아집니다. 이 파라미터는 속도와 품질의 균형을 맞추는 데 사용할 수 있습니다.
RGB 영상을 가져와 표시합니다.
A = imread('peppers.png'); figure imshow(A) title('Original Image')

세부 묘사를 다루려면 sigma 값을 사용하고, 대비를 늘려 영상의 국소 대비를 향상하려면 alpha 값을 사용하십시오.
sigma = 0.2; alpha = 0.3;
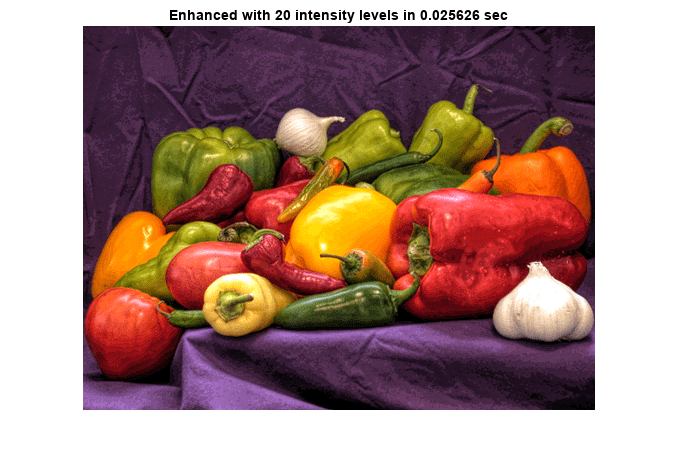
사용하는 샘플 수가 적을수록 실행 속도가 빨라지지만, 특히 평탄한 대비 영역에서 눈에 띄는 아티팩트가 생길 수 있습니다. 20개의 명암 수준만 사용하여 함수를 실행하고 시간을 측정합니다.
t_speed = timeit(@() locallapfilt(A, sigma, alpha, 'NumIntensityLevels', 20)) t_speed = 0.0115
이제 영상을 처리하고 표시합니다.
B_speed = locallapfilt(A, sigma, alpha, 'NumIntensityLevels', 20); figure imshow(B_speed) title(['Enhanced with 20 intensity levels in ' num2str(t_speed) ' sec'])
샘플 수가 많으면 처리 시간이 길어지지만, 더 보기 좋은 결과를 얻습니다. 100개의 명암 수준을 사용하여 함수를 실행하고 시간을 측정합니다.
t_quality = timeit(@() locallapfilt(A, sigma, alpha, 'NumIntensityLevels', 100))t_quality = 0.0337
100개의 명암 수준으로 영상을 처리하고 표시합니다.
B_quality = locallapfilt(A, sigma, alpha, 'NumIntensityLevels', 100); figure imshow(B_quality) title(['Enhancement with 100 intensity levels in ' num2str(t_quality) ' sec'])

각자의 영상에서 명암 수준의 개수를 달리해 보십시오. 또한 대비를 평탄화해 보십시오(alpha > 1). 최적의 명암 수준 개수는 영상마다 다르고 alpha에 따라 달라진다는 것을 알 수 있습니다. 기본적으로 locallapfilt는 발견적으로 속도와 품질의 균형을 맞추지만, 모든 영상에 대해 최상의 값을 예측할 수는 없습니다.
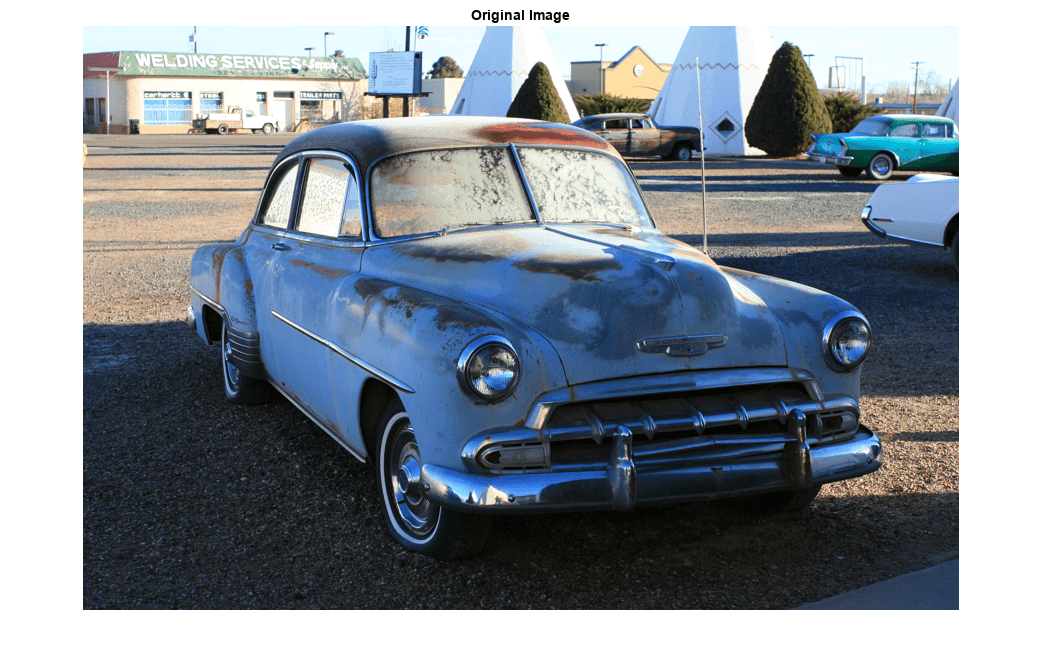
컬러 영상을 가져와 그 크기를 줄여 표시합니다.
A = imread('car2.jpg'); A = imresize(A, 0.25); figure imshow(A) title('Original Image')
정규화된 범위 0 ~ 1 중 0.3보다 작은 세부 묘사를 획기적으로 향상하도록 필터의 파라미터를 설정합니다.
sigma = 0.3; alpha = 0.1;
색 필터링의 2가지 모드를 비교해 보겠습니다. 명암을 필터링하고 각 색 채널을 개별적으로 필터링하는 방식으로 영상을 처리합니다.
B_luminance = locallapfilt(A, sigma, alpha); B_separate = locallapfilt(A, sigma, alpha, 'ColorMode', 'separate');
필터링된 영상을 표시합니다.
figure
imshow(B_luminance)
title('Enhanced by boosting the local luminance contrast')
figure
imshow(B_separate)
title('Enhanced by boosting the local color contrast')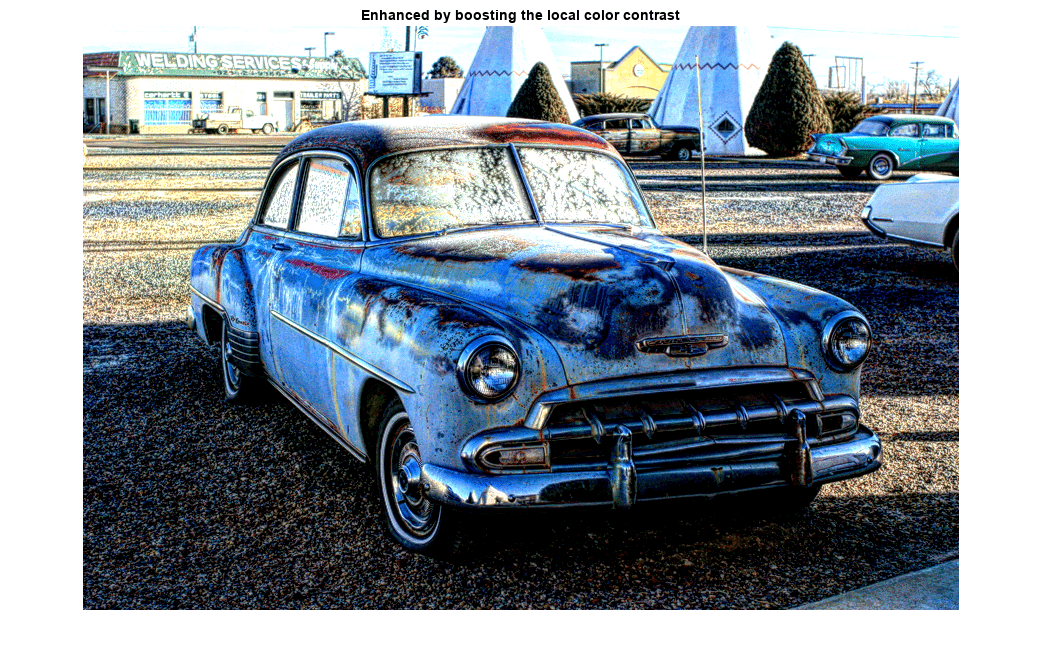
각 영상에 같은 양의 대비 향상이 적용되었지만, 'ColorMode'를 'separate'로 설정한 결과에서 색의 채도가 더 높아졌습니다.
영상을 가져옵니다. 더 손쉽게 인공 잡음을 추가할 수 있도록 영상을 부동소수점으로 변환합니다.
A = imread('pout.tif');
A = im2single(A);평균 0, 분산 0.001을 갖는 가우스 잡음을 추가합니다.
A_noisy = imnoise(A, 'gaussian', 0, 0.001); psnr_noisy = psnr(A_noisy, A); fprintf('The peak signal-to-noise ratio of the noisy image is %0.4f\n', psnr_noisy);
The peak signal-to-noise ratio of the noisy image is 30.0234
평활화할 세부 묘사의 진폭을 설정한 다음 적용할 평활화의 양을 설정합니다.
sigma = 0.1; alpha = 4.0;
경계 인식 필터를 적용합니다.
B = locallapfilt(A_noisy, sigma, alpha);
psnr_denoised = psnr(B, A);
fprintf('The peak signal-to-noise ratio of the denoised image is %0.4f\n', psnr_denoised);The peak signal-to-noise ratio of the denoised image is 32.3362
영상의 PSNR 향상에 주목하십시오.
3개 영상 모두 나란히 표시합니다. 세부 묘사가 평활화되고 경계에서의 뚜렷한 명암 변화는 그대로 유지됩니다.
figure subplot(1,3,1), imshow(A), title('Original') subplot(1,3,2), imshow(A_noisy), title('Noisy') subplot(1,3,3), imshow(B), title('Denoised')

영상을 가져와 크기를 조정하고 표시합니다.
A = imread('car1.jpg'); A = imresize(A, 0.25); figure imshow(A) title('Original Image')
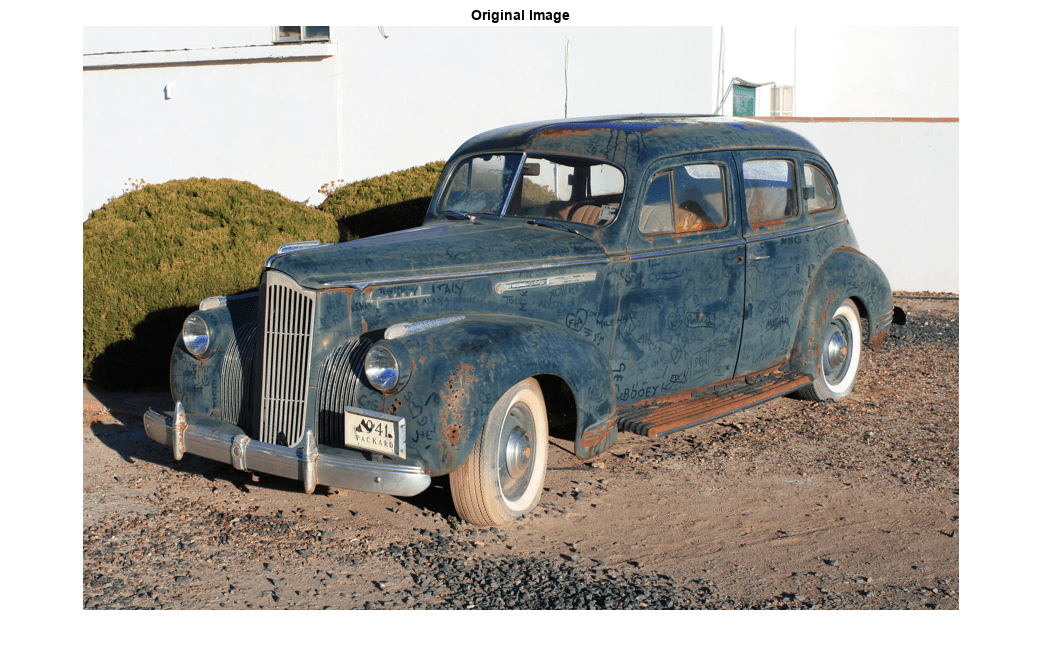
자동차가 더럽고 온갖 자국이 가득합니다. 본체의 먼지와 자국을 지워보겠습니다. 평활화할 세부 묘사의 진폭을 설정하고 많은 양의 평활화를 적용하도록 설정합니다.
sigma = 0.2; alpha = 5.0;
1보다 큰 alpha로 평활화하면서 필터는 작은 명암 수준을 사용하여 우수한 품질의 결과를 생성합니다. 더 빨리 영상을 처리하려면 작은 명암 수준을 설정하십시오.
numLevels = 16;
필터를 적용합니다.
B = locallapfilt(A, sigma, alpha, 'NumIntensityLevels', numLevels);"깔끔한" 차를 표시합니다.
figure
imshow(B)
title('After smoothing details')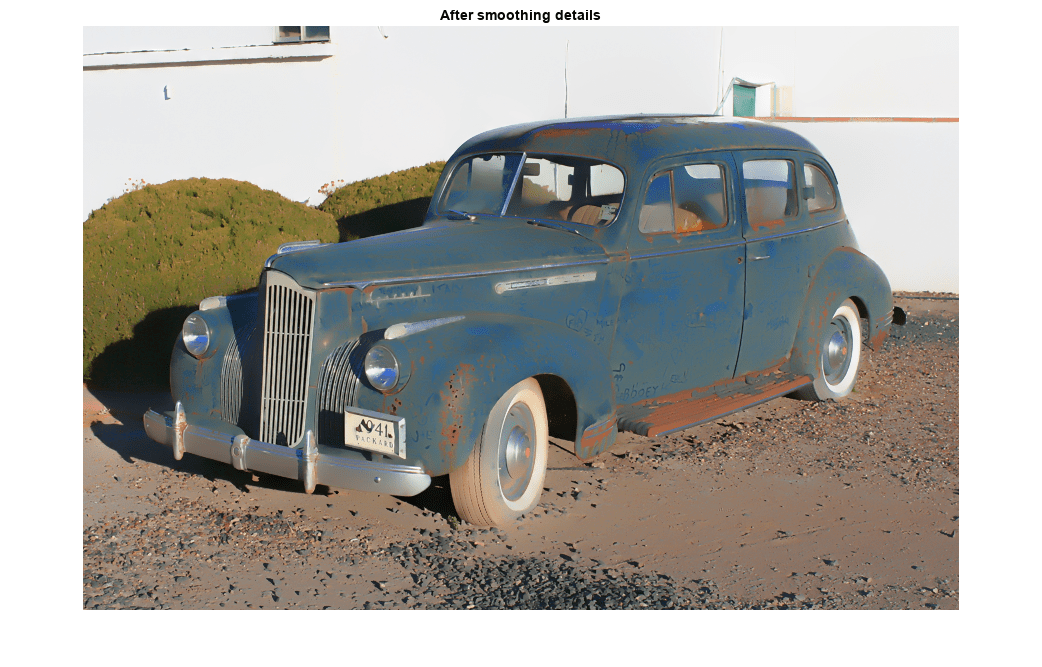
입력 인수
이름-값 인수
출력 인수
참고 문헌
[1] Paris, Sylvain, Samuel W. Hasinoff, and Jan Kautz. Local Laplacian filters: edge-aware image processing with a Laplacian pyramid, ACM Trans. Graph. 30.4 (2011): 68.
[2] Aubry, Mathieu, et al. Fast local laplacian filters: Theory and applications. ACM Transactions on Graphics (TOG) 33.5 (2014): 167.