Double-Acting Rotary Actuator (IL)
Double-acting rotary actuator in an isothermal liquid system

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Actuators
Description
The Double-Acting Rotary Actuator (IL) block models a rotary actuator in an isothermal liquid network. The actuator converts the pressure differential between two chambers into mechanical torque. The motion of the piston when it is near full extension or full retraction is limited by one of four hard stop models.
Ports A and B are the isothermal liquid conserving
ports associated with inlets of chamber A and chamber B, respectively. Port
R is associated with the actuator shaft and port
C is associated with the reference actuator casing. If
Mechanical orientation is set to Pressure at A
causes positive rotation of R relative to C, the pressure in chamber A
causes a positive rotation of the shaft at port R relative to port
C. When the shaft angle is calculated internally, the physical
signal port q reports the shaft angle. When the angle is set by a
connection to a Simscape™
Multibody™ joint, it is received as a physical signal at port
q.
Displacement
The piston displacement is measured as the position at port R relative
to port C. The Mechanical orientation
identifies the direction of piston displacement. The piston displacement is neutral,
or 0, when the chamber volume is equal to the chamber dead
volume. When displacement is received as an input, ensure that the derivative of the
position is equal to the piston velocity. This is automatically the case when the
input is received from a Rotational Multibody Interface block
connection to a Simscape Multibody joint.
Hard Stop Model
To avoid mechanical damage to an actuator when it is fully extended or fully retracted, an actuator typically displays nonlinear behavior when the piston approaches these limits. The Single-Acting Rotary Actuator (IL) block models this behavior with a choice of four hard stop models, which model the material compliance through a spring-damper system. The hard stop models are:
Stiffness and damping applied smoothly through transition region, damped rebound.Full stiffness and damping applied at bounds, undamped rebound.Full stiffness and damping applied at bounds, damped rebound.Based on coefficient of restitution
The hard stop force is modeled when the piston is at its upper or lower bound. The boundary region is within the Transition region of the Stroke or piston initial displacement. Outside of this region,
For more information about these settings, see the Rotational Hard Stop block page.
Block Schematics
The Double-Acting Rotary Actuator (IL) block comprises three Foundation Library blocks:
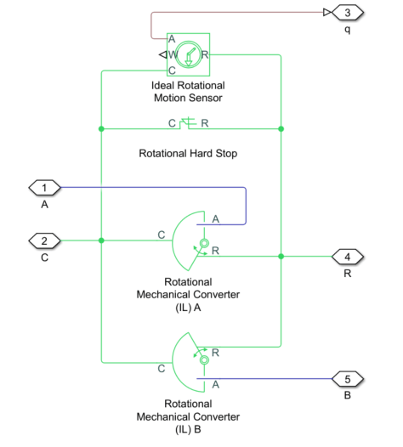
Leakage
Laminar leakage is not accounted for in the Double-Acting Rotary Actuator
(IL) block. To include leakage in your simulation, set the
Cross-sectional geometry parameter to
Custom and connect ports A and
B to ports A and
B of a Laminar Leakage (IL)
block.
Examples
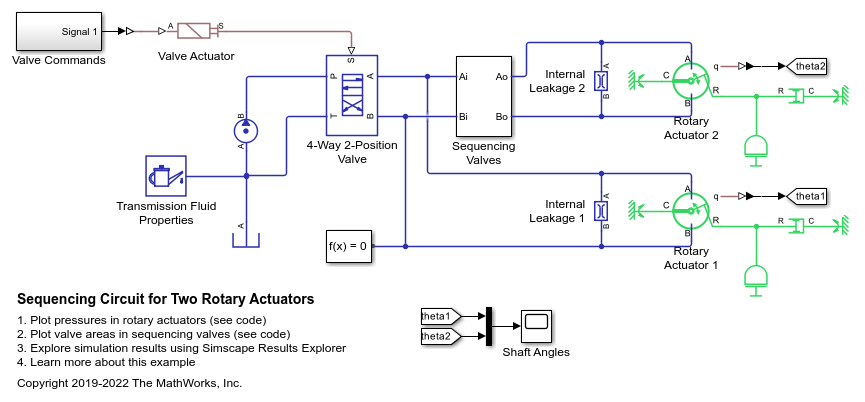
Sequencing Circuit for Two Rotary Actuators
A sequencing circuit that is based on four check valves installed in the pressure and return lines of the second rotary actuator. The cracking pressure of the meter-in check valves is set high enough to prevent flow into rotary actuator 2 while rotary actuator 1 is rotating, but lower than the pressure that develops once rotary actuator 1 reaches its hard stop. As a result, rotary actuator 2 starts moving only after rotary actuator 1 completes its stroke.