detect
Detect signals using platform-mounted sensors
Syntax
Description
dets = detect(ptfm,time)dets, from all the sensors mounted on the platform,
ptfm, at the specified time. This syntax applies
when sensors do not require knowledge of any signals present in the scenario, for example,
when the fusionRadarSensor
object property HasInterference is set to
false.
dets = detect(ptfm,signals,time)signals, present in the scenario. This
syntax applies when sensors require knowledge of these signals, for example, when a radarSensor
object is configured as an EM sensor.
dets = detect(ptfm,signals,emitterconfigs,time)emitterconfigs. This syntax
applies when sensors require knowledge of the configurations of emitters generating signals
in the scenario. For example, when an fusionRadarSensor
object is configured as a monostatic radar.
[
also returns all sensor configurations, dets,numDets,sensorconfigs] = detect(___)sensorconfigs. This output
syntax can be used with any of the input syntaxes.
Input Arguments
Output Arguments
More About
This section describes the structure of object detections.
The sensor measures the coordinates of the target. The Measurement
and MeasurementNoise values are reported in the coordinate system
specified by the DetectionCoordinates property of the sensor.
When the DetectionCoordinates property is
'Scenario', 'Body', or 'Sensor
rectangular', the Measurement and
MeasurementNoise values are reported in rectangular coordinates.
Velocities are only reported when the range rate property,
HasRangeRate, is true.
When the DetectionCoordinates property is 'Sensor
spherical', the Measurement and
MeasurementNoise values are reported in a spherical coordinate
system derived from the sensor rectangular coordinate system. Elevation and range rate are
only reported when HasElevation and HasRangeRate
are true.
Measurements are ordered as [azimuth, elevation, range, range rate]. Reporting of
elevation and range rate depends on the corresponding HasElevation and
HasRangeRate property values. Angles are in degrees, range is in
meters, and range rate is in meters per second.
Measurement Coordinates
| DetectionCoordinates | Measurement and Measurement Noise Coordinates | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Scenario' | Coordinate Dependence on
| |||||||||||||||
'Body' | ||||||||||||||||
'Sensor rectangular' | ||||||||||||||||
'Sensor spherical' | Coordinate Dependence on
|
The MeasurementParameters property consists of an array of structures
that describe a sequence of coordinate transformations from a child frame to a parent frame
or the inverse transformations (see Frame Rotation). In most cases, the
longest required sequence of transformations is Sensor → Platform → Scenario.
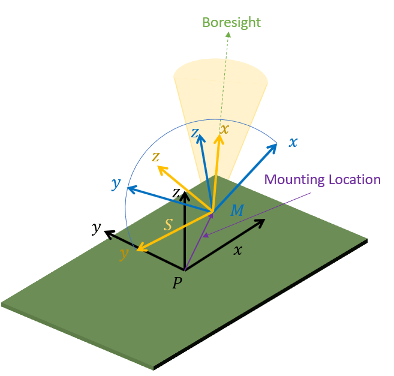
If the detections are reported in sensor spherical coordinates and
HasINS is set to false, then the sequence
consists only of one transformation from sensor to platform. In the transformation, the
OriginPosition is same as the MountingLocation
property of the sensor. The Orientation consists of two consecutive
rotations. The first rotation, corresponding to the MountingAngles
property of the sensor, accounts for the rotation from the platform frame
(P) to the sensor mounting frame (M). The second
rotation, corresponding to the azimuth and elevation angles of the sensor, accounts for the
rotation from the sensor mounting frame (M) to the sensor scanning frame
(S). In the S frame, the x
direction is the boresight direction, and the y direction lies within the
x-y plane of the sensor mounting frame
(M).
If HasINS is true, the sequence of transformations
consists of two transformations – first form the scenario frame to the platform frame then
from platform frame to the sensor scanning frame. In the first transformation, the
Orientation is the rotation from the scenario frame to the platform
frame, and the OriginPosition is the position of the platform frame
origin relative to the scenario frame.
Trivially, if the detections are reported in platform rectangular coordinates and
HasINS is set to false, the transformation
consists only of the identity.
The fields of MeasurementParameters are shown here. Not all fields have
to be present in the structure. The set of fields and their default values can depend on the
type of sensor.
| Field | Description |
Frame | Enumerated type indicating the frame used to report
measurements. When detections are reported using a rectangular
coordinate system, |
OriginPosition | Position offset of the origin of the child frame relative to the parent frame, represented as a 3-by-1 vector. |
OriginVelocity | Velocity offset of the origin of the child frame relative to the parent frame, represented as a 3-by-1 vector. |
Orientation | 3-by-3 real-valued orthonormal frame rotation matrix. The
direction of the rotation depends on the
|
IsParentToChild | A logical scalar indicating if |
HasElevation | A logical scalar indicating if elevation is included in the
measurement. For measurements reported in a rectangular frame, and
if |
HasAzimuth | A logical scalar indicating if azimuth is included in the measurement. |
HasRange | A logical scalar indicating if range is included in the measurement. |
HasVelocity | A logical scalar indicating if the reported detections include
velocity measurements. For measurements reported in the rectangular
frame, if |
Object attributes contain additional information about a detection:
| Attribute | Description |
TargetIndex | Identifier of the platform, |
SNR | Detection signal-to-noise ratio in dB. |
Version History
Introduced in R2018b
See Also
emit | pose | targetPoses