local2latlon
로컬 카테시안 좌표를 지리 좌표로 변환
설명
[은 로컬 카테시안 좌표의 lat,lon,alt] = local2latlon(xEast,yNorth,zUp,origin)xEast, yNorth, zUp으로 지정되는 점 위치를 lat, lon, alt으로 반환되는 지리 좌표로 변환합니다. origin은 로컬 좌표계의 앵커를 [latOrigin,lonOrigin,altOrigin] 형식의 요소를 3개 가진 벡터로 지정합니다. 로컬 좌표 xEast, yNorth, zUp은 각각 동쪽 방향, 북쪽 방향, 위쪽 방향과 정렬됩니다. alt와 altOrigin은 GPS 센서가 일반적으로 반환하는 고도입니다.
예제
지리 좌표계에 앵커 점을 설정합니다. 다음의 위도, 경도 좌표는 마이애미주 보스턴을 지정합니다.
origin = [42.3648, -71.0214, 10.0];
로컬 경로를 카테시안 좌표 x, y,, z로 생성합니다.
z = zeros(1,101); % maintain height of 0 m x = 0:1000:100000; % 100 km in 1 km increments y = x; % move 100 km northeast
로컬 경로 좌표를 지리 좌표의 위도, 경도로 변환합니다.
[lat,lon] = local2latlon(x,y,z,origin);
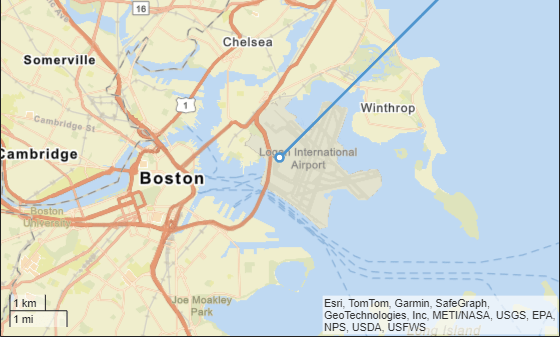
경로를 맵에 시각화합니다.
zoomLevel = 12; player = geoplayer(lat(1),lon(1),zoomLevel); plotRoute(player,lat,lon);
입력 인수
출력 인수
팁
지리 좌표계의 위도와 경도는 GPS 수신기에서 일반적으로 사용되는 WGS84 표준을 사용합니다.
이 함수는 고도를 WGS84 기준 타원체에서의 높이로 정의합니다(단위: 미터).
일부 GPS 수신기는 WGS84 이외의 표준을 사용합니다. Mapping Toolbox는 다른 타원체를 사용하는 변환을 제공합니다. 이 함수는 차량의 온보드 센서에서 사용되는 지리 위치와 카테시안 좌표 간의 가장 일반적인 변환을 사용합니다.