driving.DubinsPathSegment
Dubins path segment
Description
A driving.DubinsPathSegment object represents a segment of a planned vehicle
path that was connected using the Dubins connection method [1]. A Dubins path segment is
composed of a sequence of three motions. Each motion is one of these types:
Straight
Left turn at the maximum steering angle of the vehicle
Right turn at the maximum steering angle of the vehicle
A vehicle path composed of Dubins path segments allows motion in the forward direction only.
The driving.DubinsPathSegment objects that represent a path are stored in the
PathSegments property of a driving.Path
object. These paths are planned by a pathPlannerRRT
object whose ConnectionMethod property is set to
'Dubins'.
Properties
Examples
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. The planned path is composed of a sequence of Dubins path segments. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)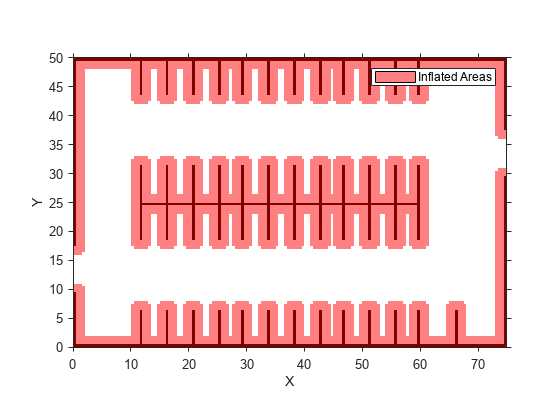
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [53.3, 19, 90];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose. Set the ConnectionMethod property of the pathPlannerRRT object to 'Dubins'.
planner = pathPlannerRRT(costmap);
planner.ConnectionMethod = 'Dubins';
refPath = plan(planner,startPose,goalPose);Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
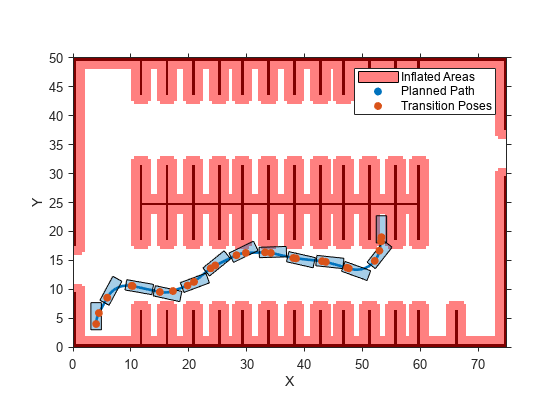
Notice that the path from the start pose to the goal pose does not require a reverse motion. Hence, the planned path is valid. In scenarios where a reverse motion is required to reach the goal pose, use Reeds-Shepp path segments as Dubins path segments do not allow reverse motion.
References
[1] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins Set." Robotics and Autonomous Systems. Vol. 34, Number 4, 2001, pp. 179–202.
Extended Capabilities
Version History
Introduced in R2018b