제어 시스템 디자이너 시작하기
이 예제는 제어 시스템 디자이너를 사용하여 피드백 제어 시스템에 대한 보상기를 조정하는 방법을 보여줍니다.
제어 시스템 디자이너를 사용하여 다음 작업을 수행할 수 있습니다.
1) 시간, 주파수 및 극점-영점 응답 플롯에 대한 제어 설계 요구 사항을 정의합니다.
2) 다음을 통해 보상기를 조정합니다.
PID 조정, IMC, LQG 같은 자동화된 설계 방법.
보드, 근궤적과 같은 설계 플롯에서 극점과 영점을 시각적으로 조정.
Simulink® Design Optimization™을 사용하여 시간 영역 및 주파수 영역 요구 사항을 충족하는 최적화 기반의 제어 설계.
3) 제어 시스템 성능을 표시하도록 동적으로 업데이트되는 폐루프 및 개루프 응답을 시각화합니다.
보상기 설계 문제
이 예제에서는 다음 시스템을 위한 보상기를
다음 설계 요구 사항으로 설계합니다.
계단 입력에 대한 정상 상태 오차가 0임
상승 시간의 80%가 1초 미만임.
정착 시간이 2초 미만임.
최대 오버슈트가 20% 미만임.
개루프 교차 주파수가 5rad/s보다 작음.
제어 시스템 디자이너 열기
제어기가 정방향 경로에 있는 표준 피드백 구조를 사용합니다. 이 구조는 디폴트 제어 시스템 디자이너 아키텍처입니다.
지정된 플랜트와 함께 제어 시스템 디자이너를 엽니다.
controlSystemDesigner(tf(1,[1,1]))

제어 시스템 탭에서 보상기 조정 방법을 선택하고, 제어기 성능 분석을 위한 응답 플롯을 만들 수 있습니다. 서로 다른 제어 시스템 설계를 저장하고 비교하고 내보낼 수도 있습니다.
이 예제에서는 근궤적 편집기 및 개루프 보드 편집기를 사용하여 시각적으로 보상기를 조정하고, 폐루프 계단 응답을 사용하여 설계를 검증합니다. 기본적으로 제어 시스템 디자이너가 열리면 이러한 응답이 표시됩니다. 응답 플롯을 추가하려면 새 플롯을 클릭하십시오.
설계 요구 사항 추가하기
시간 영역 설계 요구 사항을 계단 응답 플롯에 추가합니다. 플롯 영역을 마우스 오른쪽 버튼으로 클릭하고 설계 요구 사항 > 새로 만들기를 선택합니다. 설계 요구 사항 유형 드롭다운 목록에서 Step response bound를 선택합니다. 시간 영역 설계 요구 사항을 입력합니다.
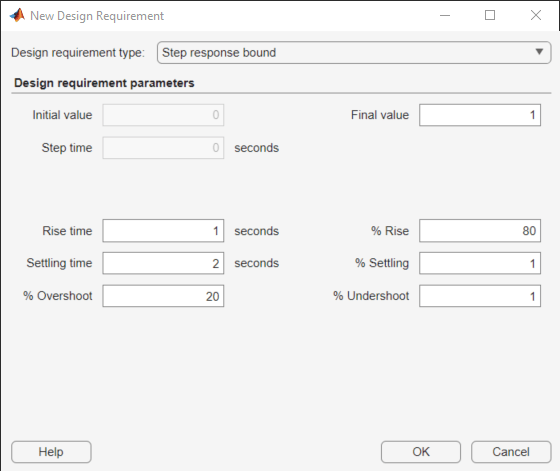
확인을 클릭합니다. 설계 요구 사항이 계단 응답 플롯에 음영 처리된 제외 영역으로 추가됩니다. 요구 사항을 충족하려면 계단 응답이 이 영역 외부에 있어야 합니다.

주파수 영역 교차 요구 사항을 지정하려면, 보드 편집기 플롯 영역을 마우스 오른쪽 버튼으로 클릭하고 설계 요구 사항 > 새로 만들기를 선택합니다. 설계 요구 사항 유형 드롭다운 목록에서 Upper gain limit를 선택하고 설계 요구 사항을 지정합니다.

확인을 클릭합니다.
보상기 조정하기
정상 상태 오차가 0이라는 설계 요구 사항을 충족하기 위해 적분기를 보상기에 추가합니다. 근궤적 편집기 플롯 영역을 마우스 오른쪽 버튼으로 클릭하고 극점 또는 영점 추가 > 적분기를 선택합니다.
근궤적 플롯에 적합한 형태를 만들려면 -2 근처에 실수 영점을 추가합니다. 근궤적 플롯 영역을 마우스 오른쪽 버튼으로 클릭하고 극점 또는 영점 추가 > 실수 영점을 선택합니다. 근궤적 플롯에서 -2 근처의 실수축을 마우스 왼쪽 버튼으로 클릭합니다.
보상기 이득을 높여 응답 속도를 더 빠르게 하려면 보드 편집기에서 크기 응답을 위로 끌어서 놓습니다. 교차 주파수 요구 사항을 충족하려면 보드 편집기에서 제외 영역 아래에 응답을 유지합니다.

보상기를 보려면 보드 편집기 또는 근궤적 편집기 플롯 영역을 마우스 오른쪽 버튼으로 클릭하고 보상기 편집...을 선택하십시오.
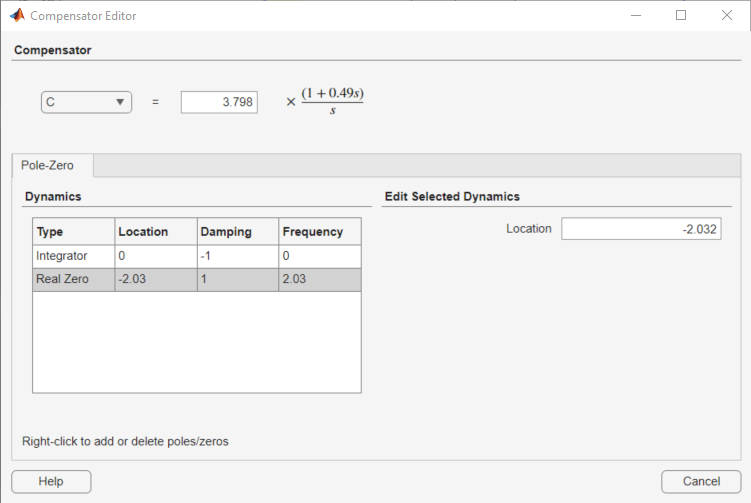
보상기 편집기 대화 상자에서도 보상기 파라미터를 조정할 수 있습니다.
자동화된 보상기 조정
시각적 조정 외에 자동화된 조정 방법을 사용할 수도 있습니다. 자동화된 조정 방법을 선택하려면 조정 방법을 클릭하십시오.
PID 조정, IMC 조정, LQG 합성 - 폐루프 시정수 같은 조정 사양을 기반으로 초기 보상기 파라미터를 계산합니다. 예제는 Design LQG Tracker Using Control System Designer 항목을 참조하십시오.
최적화 기반 조정 - 시간 영역 및 주파수 영역 설계 요구 사항을 모두 사용하여 보상기를 최적화합니다(Simulink Design Optimization이 필요함). 예제는 DC 모터 제어기 조정 (Simulink Design Optimization) 항목을 참조하십시오.
루프 성형 - 원하는 목표 루프 형태를 지정합니다(Robust Control Toolbox™가 필요함).