getrom
Description
Use getrom to obtain reduced-order models from a
ModalTruncation or SparseModalTruncation model order
reduction task. For the full workflow, see Task-Based Model Order Reduction Workflow.
rsys = getrom(R,Name=Value)rsys based on the options specified by
one or more name-value arguments.
rsys = getrom(R)sys.
For the ordinary modal truncation, this syntax returns:
The modal form (same as
modalreal) ofsyswhenR.Options.ModeOnlyis set tofalseThe Schur form when
R.Options.ModeOnlyis set totrue.
For sparse modal truncation, this syntax returns a reduced modal form based on the subset of modes computed by the algorithm. This subset is controlled by the
R.Options.FocusorR.Options.MaxOrderoptions
getrom( returns help specific to
the model order specification object R,'-help')R. The returned help shows the
name-value arguments and syntaxes applicable to R.
Examples
This example shows how to obtain a reduced-order model for a linear time-invariant (LTI) model using the modal truncation method. In this example, you reduce a high-order model with a focus on the dynamics in a particular frequency range and damping.
Load a model and examine its frequency response.
load('highOrderModel.mat','G') bodeplot(G)

G is a 48th-order model with several large peak regions around 5.2 rad/s, 13.5 rad/s, and 24.5 rad/s, and smaller peaks scattered across many frequencies.
Create a model order reduction task.
R = reducespec(G,"modal"); figure view(R,"damp")
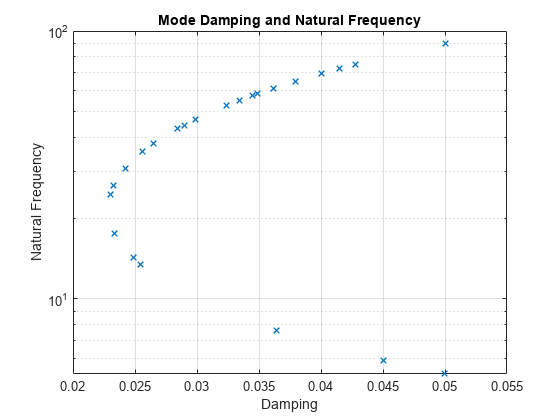
Suppose that for your application you are only interested in the dynamics between 10 rad/s and 40 rad/s with damping less than 0.04. Focus the model reduction on the region of interest to obtain a good match with a low-order approximation.
rsys = getrom(R,Frequency=[10,40],Damping=[0.022 0.04]); bp = bodeplot(G,rsys,"r--"); bp.PhaseMatchingEnabled = "on"; legend("Full order","Reduced order");

The reduced-order model provides a good approximation for the specified targets.
This example shows how to obtain a reduced-order model of a structural beam using the modal truncation method. For this example, consider a SISO sparse state-space model of a cantilever beam. This example uses the linearized model from the Linear Analysis of Cantilever Beam example.
Load the beam model.
load linBeam.mat
size(sys)Sparse second-order model with 1 outputs, 1 inputs, and 3303 degrees of freedom.
Plot the Bode response.
bode(sys,w)

Create a model order reduction task.
R = reducespec(sys,"modal");Set the Focus option to compute the eigenvalues only in the specified frequency range.
R.Options.Focus = [0 5e5];
Analyze the model and compute the derived information.
R = process(R); size(R.Mode)
ans = 1×2
26 1
The original model contains 26 modes. View the DC contribution of the modal components using the view function.
view(R,"contrib")
Discard the modes with smaller contributions. For this example, discard all modes with DC contribution smaller than 1e-6. This results in a reduced model with 12 modes.
[rsys,info] = getrom(R,MinDC=1e-6);
Plot the bode responses.
bode(sys,rsys,w)

The reduced-order model provides a good approximation for the original sparse model.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Version History
Introduced in R2023b
See Also
Functions
reducespec|process|view (balanced)|getrom (balanced)|view (ncf)|getrom (ncf)|view (modal)