이 페이지는 기계 번역을 사용하여 번역되었습니다. 영어 원문을 보려면 여기를 클릭하십시오.
유도항법제어(GNC)
유도(guidance) 블록을 사용하여 두 비행체 간의 거리를 계산하고, 제어기 블록을 사용하여 비행체의 이동(예: 비행체 경로, 위치, 속도) 및 비행체에 작용하는 힘을 제어합니다. 네비게이션 블록을 사용하여 세 축 각각에서 가속도계, 자이로스코프 및 관성 측정 장치(IMU)를 모델링합니다. IMU는 하나의 3축 가속도계와 하나의 3축 자이로스코프로 구성됩니다. 파일럿 크로스오버, 정밀도 및 Tustin 모델을 구현합니다.
카테고리
추천 예제
경량 항공기 설계
경량 항공기 설계를 통해 항공기 설계에 수반되는 기술·공정상의 과제를 해결합니다.

Simulink Control Design를 사용한 기체 트리밍 및 선형화
Simulink® Control Design™을 사용하여 기체를 트리밍하고 선형화합니다.
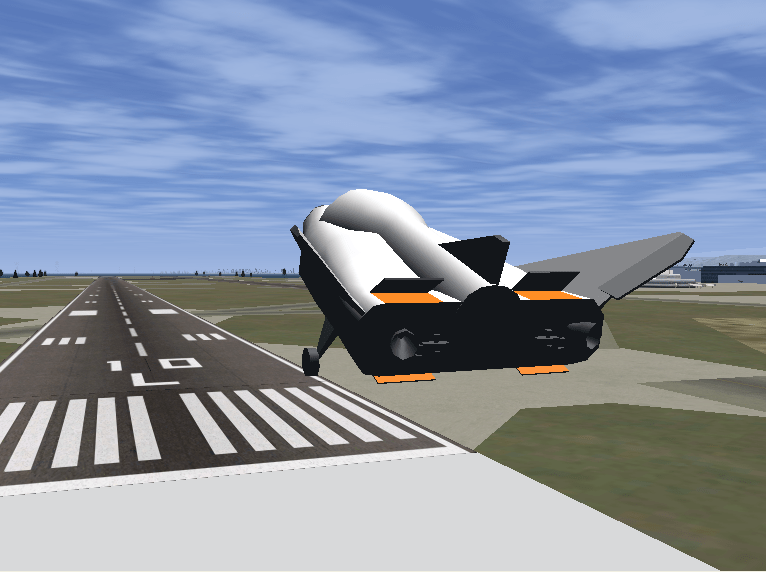
HL-20 프로젝트 (선택적 FlightGear 인터페이스 포함)
Simulink와 Aerospace Blockset™에서 NASA HL-20 리프팅 바디와 제어기를 모델링하고 FlightGear를 사용하여 시각화합니다.

아폴로 달 착륙선 디지털 오토파일럿 개발
Simulink와 Aerospace Blockset을 사용하여 아폴로 달 착륙선의 디지털 오토파일럿을 개발합니다.

Indicated Airspeed from True Airspeed Calculation
Compute the indicated airspeed from true airspeed using the Ideal Airspeed Correction block.

True Airspeed from Indicated Airspeed Calculation
Compute the indicated airspeed from true airspeed using the Ideal Airspeed Correction block.

Self-Conditioned Controller Comparison
Compare the implementation of a state-space controller [A,B,C,D] in a self-conditioned form versus a typical state-space controller [A,B,C,D].

Transition from Low- to High-Fidelity UAV Models in Three Stages
Evolve UAV plant model continuously to stay in sync with the latest information available.
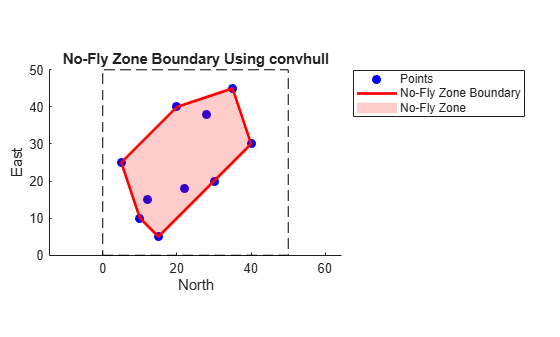
Generate Trajectory Live Editor Task for Flight Mission with No-Fly Zones
Use the Generate Trajectory live task to create a polynomial trajectory with no-fly zones using waypoints.