How to Implement and Validate Motor Control Algorithms | Field-Oriented Control of Induction Motor with Simulink, Part 4
From the series: Field-Weakening Control for PMSMs with Simulink and Motor Control Blockset
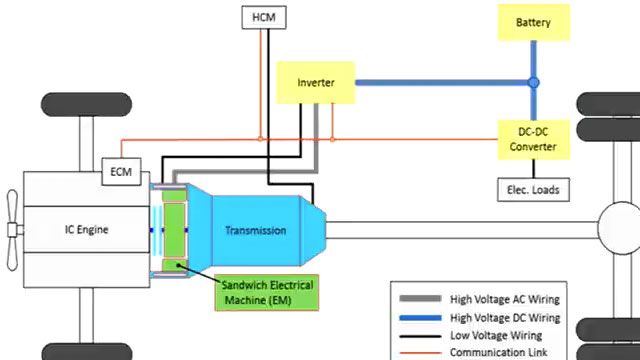
Learn how to implement field-oriented control algorithms for induction motors using reference examples included with Motor Control Blockset™. Verify the performance of your algorithm in a closed-loop simulation, then generate code and deploy it on an embedded microcontroller using Embedded Coder®.
Published: 17 Nov 2020
Related Products
Learn More

Featured Product