opticalFlowRAFT
설명
opticalFlowRAFT 객체를 사용하여 RAFT(Recurrent All-pairs Field Transforms) 알고리즘으로 이전 및 현재 비디오 프레임 간의 모션 방향과 속도를 추정합니다. 이 알고리즘은 Kubric[3] 데이터셋에서 훈련된 딥러닝 신경망을 사용합니다. RAFT 광학 흐름 추정 알고리즘은 특히 텍스처가 거의 없는 영역이나 모션 블러가 있는 영역, 그리고 카메라 움직임이 복잡한 경우에서도 정확도가 높아 Farneback과 같은 방식보다 더 뛰어난 성능을 보입니다. 이 알고리즘은 픽셀당 밀도가 높고 매우 정확한 추정값을 제공하지만 더 많은 시간과 메모리가 필요합니다. 더 빠르지만 정확도가 낮은 고밀도 광학 흐름 추정을 위해서는 딥러닝에 의존하지 않는 기존의 비전 알고리즘인 opticalFlowFarneback을 선택하십시오.
참고
이 기능을 사용하려면 Deep Learning Toolbox™와 Computer Vision Toolbox™ Model for RAFT Optical Flow Estimation이 필요합니다. 애드온 탐색기에서 Computer Vision Toolbox Model for RAFT Optical Flow Estimation을 설치할 수 있습니다. 애드온 설치에 대한 자세한 내용은 애드온을 받고 관리하기를 참조하십시오.
생성
설명
flowModel = opticalFlowRAFT는 이전 및 현재 비디오 프레임 간의 모션 방향과 속도를 추정하는 optical flow 객체를 반환합니다.
객체 함수
estimateFlow | Estimate optical flow between two frames |
reset | Reset the internal state of the optical flow estimation object |
예제
RAFT optical flow 객체를 만듭니다.
flowModel = opticalFlowRAFT;
입력 비디오 파일을 읽을 객체를 만듭니다.
vidReader = VideoReader("visiontraffic.avi",CurrentTime=11);광학 흐름 벡터를 시각화하는 사용자 지정 Figure 창을 생성합니다.
h = figure;
movegui(h);
hViewPanel = uipanel(h, Position=[0 0 1 1], Title="Plot of Optical Flow Vectors");
hPlot = axes(hViewPanel);광학 흐름을 추정하기 위해 연속적인 영상 프레임을 읽습니다. 현재 프레임을 표시하고 퀴버 플롯을 사용하여 광학 흐름 벡터를 겹쳐 표시합니다. estimateFlow 함수는 연속적인 두 프레임 간의 광학 흐름을 계산합니다.
이 함수는 내부적으로 이전 프레임을 저장하고 광학 흐름 추정에 묵시적으로 활용합니다. 따라서 프레임 시퀀스에서 이 함수를 처음 호출하면 흐름이 0으로 반환됩니다. 이는 실제 이전 프레임이 없기 때문에 초기 프레임이 현재 프레임과 이전 프레임 모두로 간주되며, 그 결과 두 프레임 사이에서 검출할 수 있는 모션이 없기 때문입니다. 이는 opticalFlowFarneback과 같은 기존 광학 흐름 추정 방법의 인수 구조체 및 동작과 일치합니다.
while hasFrame(vidReader) frame = readFrame(vidReader); flow = estimateFlow(flowModel,frame); imshow(frame) hold on plot(flow,DecimationFactor=[10 10],ScaleFactor=0.45,Parent=hPlot,color="g"); hold off pause(10^-3) end

비디오 처리가 완료된 후 opticalFlowRAFT 객체를 재설정합니다. 이렇게 하면 저장된 이전 프레임을 포함하여 객체의 내부 상태가 삭제됩니다.
reset(flowModel);
RAFT는 정확한 광학 흐름 추정을 제공하지만, 크기가 큰 영상에 적용하거나 메모리가 제한된 GPU에서 실행할 경우 메모리 사용량이 많아질 수 있습니다. 이러한 경우 고해상도 프레임을 직접 처리하면 메모리 부족(OOM: out-of-memory) 오류가 발생할 수 있습니다. 실질적인 해결 방법은 입력 영상을 RAFT 모델에 전달하기 전에 다운스케일링하고, 축소된 해상도에서 광학 흐름을 계산한 다음, 결과로 생성된 흐름 필드(flow field)를 다시 영상의 원래 크기로 재스케일링하는 것입니다. 이 예제에서는 이러한 메모리 효율적인 전략을 적용하는 방법을 보여주며, 이를 통해 유의미한 흐름 추정값을 유지하면서 더 큰 영상이나 리소스가 제한된 하드웨어에서 RAFT를 사용할 수 있도록 합니다.
영상 쌍 불러오기
두 개의 영상을 불러온 다음 카메라 움직임으로 인한 픽셀별 차이를 빨강색-녹청색(red-cyan) 합성 영상을 사용하여 시각화합니다.
I1 = imread("yellowstone_left.png"); I2 = imread("yellowstone_right.png"); figure imshow(stereoAnaglyph(I1, I2)) title("Composite Image (Red - Left Image, Cyan - Right Image)")
영상의 공간 차원을 표시합니다.
disp(size(I1, [1 2]))
480 640
opticalFlowRAFT 객체 만들기
두 영상 간 광학 흐름을 계산하기 위한 opticalFlowRAFT 객체를 만듭니다.
raft = opticalFlowRAFT;
전체 해상도 영상에서 광학 흐름 추정하기
원래 해상도의 영상에서 광학 흐름을 추정합니다. 이 방법은 가장 정확한 결과를 제공하지만 실행 속도가 느려지고 메모리 사용량이 증가할 수 있습니다.
estimateFlow(raft, I1); flowFull = estimateFlow(raft, I2);
다운샘플링된 영상에서 광학 흐름 추정하기
다운스케일링된 영상 만들기
설명을 돕기 위해, 영상 차원을 0.5배율로 스케일링합니다. 해상도가 낮은 영상을 사용하면 광학 흐름 계산 속도를 높이고 메모리 사용량을 줄일 수 있습니다.
I1Small = imresize(I1, 0.5); I2Small = imresize(I2, 0.5);
크기가 조정된 영상 차원을 표시합니다.
disp(size(I1Small, [1 2]))
240 320
다운스케일링된 영상에서 흐름 추정하기
다운스케일링된 영상에서 광학 흐름을 계산합니다. 앞에서 인스턴스화한 opticalFlowRAFT 모델을 재설정한 후에 사용합니다.
reset(raft); estimateFlow(raft, I1Small); flowLowRes = estimateFlow(raft, I2Small);
추정된 흐름을 원래 해상도로 스케일링하기
저해상도의 광학 흐름을 업샘플링하고 다시 원래 영상 해상도로 스케일링합니다.
origDims = size(I1, [1 2]); scaleX = origDims(2) / size(flowLowRes.Magnitude, 2); scaleY = origDims(1) / size(flowLowRes.Magnitude, 1); flowX = imresize(flowLowRes.Vx, origDims, "bilinear") * scaleX; flowY = imresize(flowLowRes.Vy, origDims, "bilinear") * scaleY; flowUpscaled = opticalFlow(flowX, flowY);
원래 해상도와 다운스케일링된 해상도의 광학 흐름 비교하기
원래 고해상도 영상에서 직접 계산된 광학 흐름과, 다운스케일링된 영상에서 계산된 후 다시 원래 크기로 재스케일링된 광학 흐름을 시각적으로 비교합니다. 이 비교는 다운스케일링–업스케일링 워크플로가 메모리 사용량을 줄이면서 원래 광학 흐름을 어떻게 근사하는지 보여줍니다.
figure subplot(1,2,1) imshow(I1) hold on plot(flowFull, DecimationFactor=[40 40], ScaleFactor=0.75, Color="g"); hold off title("Optical Flow at Full Resolution") subplot(1,2,2) imshow(I1) hold on plot(flowUpscaled, DecimationFactor=[40 40], ScaleFactor=0.75, Color="g"); hold off title("Optical Flow at Half Resolution")
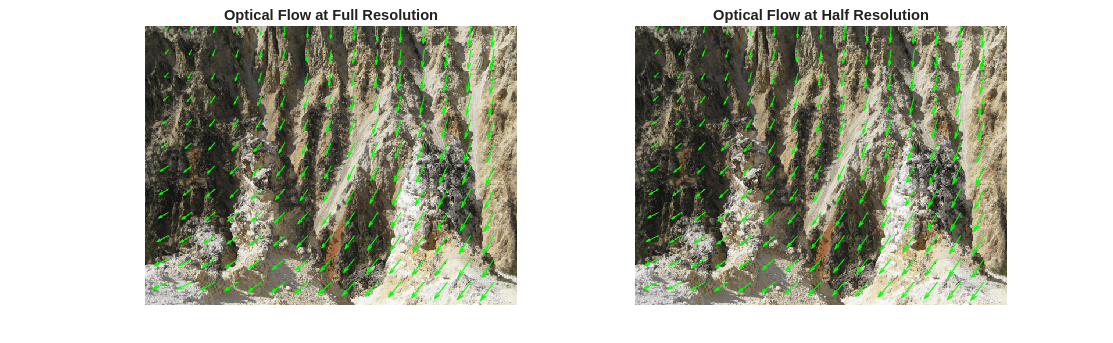
영상 크기 조정 작업에서 쌍선형 보간을 사용하면 업스케일링된 광학 흐름에서 수치상의 부정확성과 과도하게 평활화된 결과를 초래할 수 있습니다. 이 같은 정확도 저하는 저해상도 영상에서 광학 흐름 계산을 수행할 때 메모리 사용량을 줄이는 대신 감수해야 할 단점입니다.
참고 문헌
[1] Teed, Zachary, and Jia Deng. RAFT: Recurrent All-Pairs Field Transforms for Optical Flow. Proceedings of the 16th European Conference on Computer Vision. 2020.
[2] Shah, Neelay, Prajnan Goswami, and Huaizu Jiang. EzFlow: A modular PyTorch library for optical flow estimation using neural networks. 2021. Web. https://github.com/neu-vi/ezflow.
[3] Greff, Klaus, Francois Belletti, Lucas Beyer, Carl Doersch, Yilun Du, Daniel Duckworth, David J. Fleet et al. Kubric: A scalable dataset generator. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 3749-3761. 2022.
버전 내역
R2024b에 개발됨
참고 항목
객체
함수
도움말 항목
- Dense 3-D Reconstruction from Two Views Using RAFT Optical Flow
- Dense 3-D Reconstruction from Multiple Views Using RAFT Optical Flow
- Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction
- Automate Labeling of Objects in Video Using RAFT Optical Flow
- Stabilize Video Using Optical Flow
- What Is Optical Flow?