Lane Change
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Drive Cycle and Maneuvers
Description
The Lane Change block generates commands to conduct lane change maneuvers and adjusts the acceleration command according to the selected maneuver, after the vehicle reaches the target longitudinal velocity. Then, the block generates a lateral reference trajectory as a function of the longitudinal displacement. The block also generates signals indicating the left and right lane boundaries as a function of the specified track width.
Use the Lane change type, changeType parameter to select the desired lane change type.
| Action | Lane Change Type Setting |
|---|---|
Simulate a double-lane change. The block holds the acceleration constant. |
|
Simulate a lane change with obstacle avoidance. The block commands zero-acceleration. |
|
Simulate a lane change with obstacle avoidance for a truck-trailer. The block does not override the acceleration command. |
|
You must set the initial longitudinal position of the vehicle in your model to a reasonable distance from the gate and specify these block parameters to ensure the vehicle reaches the target velocity before arriving at the gate:
Inertial longitudinal position of gate entrance, XGate [m]
Longitudinal entrance velocity setpoint, velRef
Distance after target speed to begin reference, xStart [m]
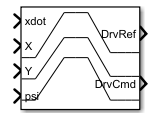
Ports
Input
Output
Driver reference data, returned as a bus containing these block values.
| Signal | Description | Units |
|---|---|---|
| Longitudinal reference velocity | m/s |
| Lateral reference displacement | m |
| Vehicle global longitudinal reference position | m |
| Vehicle global lateral reference position | m |
| Vehicle global yaw reference position | rad |
| Reference path curvature | 1/m |
| Reference path curvature gradient | 1/m^2 |
Data Types: bus
Driver command data, returned as a bus containing these block values.
| Signal | Description | Units | |
|---|---|---|---|
|
| Boolean signal used to override driver model steering commands | one |
| Handwheel angle | one | |
| Boolean signal used to override driver model steering commands
with zero when value is | one | |
| Boolean signal used to hold the current driver model steering
output when | one | |
|
| Boolean signal used to override driver model acceleration commands | one |
| Normalized accelerator input | one | |
| Boolean signal used to hold the current driver model acceleration
output when | one | |
| Boolean signal used to override driver model acceleration
commands with zero when value is | one | |
|
| Boolean signal used to override driver model deceleration commands | one |
| Normalized decelerator or brake input | one | |
| Boolean signal used to hold the current driver model deceleration
output when | one | |
| Boolean signal used to override driver model deceleration
commands with zero when value is | one | |
| Normalized handbrake or park brake input | one | |
|
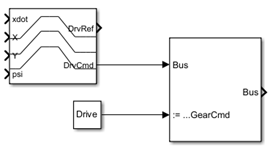
| Command to specify the transmission mode | one |
| Command to specify manual gear number or automatic transmission shifter position | one | |
| Command to upshift | one | |
| Command to downshift | one | |
| Normalized clutch open command for manual transmissions | one | |
Note
By default, the TransCmd bus is not actively used. Use a
Bus Assignment block to override the
TransCmd bus to customize and extend the scenario.
Data Types: bus
Information data, returned as a bus containing these block values.
| Signal | Description | Units |
|---|---|---|
| Left lane boundary | m |
| Right lane boundary | m |
| Lateral reference displacement | m |
| Vehicle global longitudinal reference position | m |
| Vehicle global lateral reference position | m |
Dependencies
To enable this parameter, select Output info bus.
Data Types: bus
Parameters
References
[1] "Passenger cars — Test track for a severe lane-change manoeuvre." International Organization for Standardization. https://www.iso.org/standard/67973.html.
[2] "Passenger cars — Test track for a severe lane-change manoeuvre." International Organization for Standardization. https://www.iso.org/standard/57253.html.
[3] Trigell, Annika Stensson, et al. “Advanced Vehicle Dynamics of Heavy Trucks with the Perspective of Road Safety.” Vehicle System Dynamics, vol. 55, no. 10, Oct. 2017, pp. 1572–617. DOI.org (Crossref), https://doi.org/10.1080/00423114.2017.1319964.
[4] Fancher, P., and C. Winkler. “Directional Performance Issues in Evaluation and Design of Articulated Heavy Vehicles.” Vehicle System Dynamics, vol. 45, no. 7–8, July 2007, pp. 607–47. DOI.org (Crossref), https://doi.org/10.1080/00423110701422434.