쿼드콥터 아키텍처 설계를 사용하여 항속시간(체공시간) 계산하기
이 예제에서는 System Composer™ 및 Requirements Toolbox™를 사용하고 MBSE(모델 기반 시스템 공학) 워크플로에 따라, 타깃 녹색 공을 추적하는 쿼드콥터의 물리 아키텍처[1]를 만드는 방법을 보여줍니다. 먼저, 요구 사항을 정의한 다음, 모델 요소에 대한 스테레오타입과 사용자 지정 속성값을 사용하여 아키텍처 데이터를 확장하고, 마지막으로 분석을 사용하여 설계를 반복적으로 개선합니다.
쿼드콥터 설계를 위한 기능 요구 사항 정의하기
MBSE 방법론의 첫 번째 단계는 요구 사항을 정의하는 것입니다. 운용 개념(conops)은 시스템에 대한 전체적인 개념적 구상을 정의합니다. 그런 다음 conops 요구 사항에서 기능 요구 사항을 도출하고, 요구 사항을 연결함으로써 논리 서브시스템과 물리 서브시스템을 추가로 정의합니다.
프로젝트를 엽니다.
openProject("scExampleQuadcopterEndurance");Simulink® 사용자 지정을 불러옵니다.
sl_refresh_customizations
메모리에 물리 아키텍처 모델을 불러와 요구 사항 링크를 확인합니다.
systemcomposer.loadModel("QuadArchPhysical");요구 사항 세트를 불러옵니다.
운용 개념
slreq.load("conops.slreqx");기능 요구 사항
slreq.load("FunctionalReqs_Quad.slreqx");논리 요구 사항
slreq.load("LogicalReqs_Quad.slreqx");물리 요구 사항
slreq.load("PhysicalReqs_Quad.slreqx");Requirements Editor (Requirements Toolbox)를 엽니다.
slreq.editor
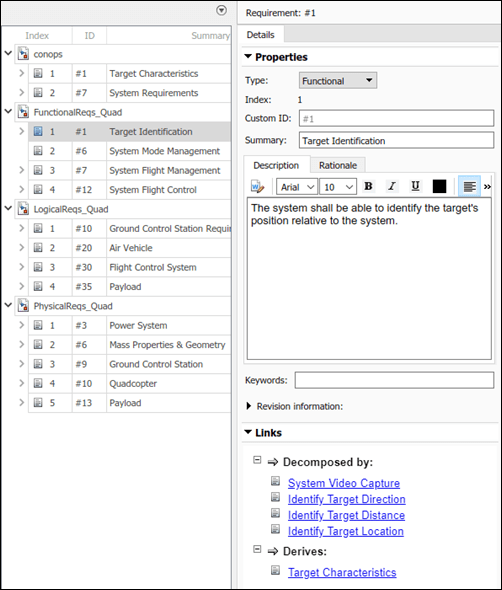
conops 요구 사항 Target Characteristics를 검사합니다. [Decomposed by] 목록에 있는 요구 사항은 최상위 요구 사항에 포함된 요구 사항을 나타냅니다. [Derives] 목록에 있는 요구 사항 Target Identification은 conops 요구 사항에서 파생된 요구 사항을 나타냅니다.
쿼드콥터의 물리 아키텍처 모델을 열려면 다음 코드를 실행하십시오.
systemcomposer.openModel("QuadArchPhysical");컴포넌트를 선택한 다음 툴스트립에서 [Format] > [Add Image]를 클릭하여 컴포넌트에 이미지를 추가할 수 있습니다. [Tools] 폴더에서 이미지를 찾습니다. [OK]를 클릭합니다.
Requirements Toolbox의 [Requirements Manager]에서 요구 사항과 아키텍처를 함께 관리합니다. [Apps] > [Requirements Manager]로 이동합니다. 이제 System Composer의 Requirements Perspective로 전환됩니다. 이 퍼스펙티브에서는 물리 아키텍처의 특정 컴포넌트와 연결된 요구 사항을 확인할 수 있습니다.

스테레오타입과 속성을 사용하여 기능 설계 지정하기
프로파일에 정의된 스테레오타입에는 해당 스테레오타입이 적용되는 모델 요소에 대한 메타데이터를 지정할 수 있는 속성이 포함됩니다.
Profile Editor 툴을 열려면 System Composer 툴스트립에서 [Modeling] > [Profile Editor]로 이동합니다. 또는 이 명령을 실행하십시오.
systemcomposer.profile.editor

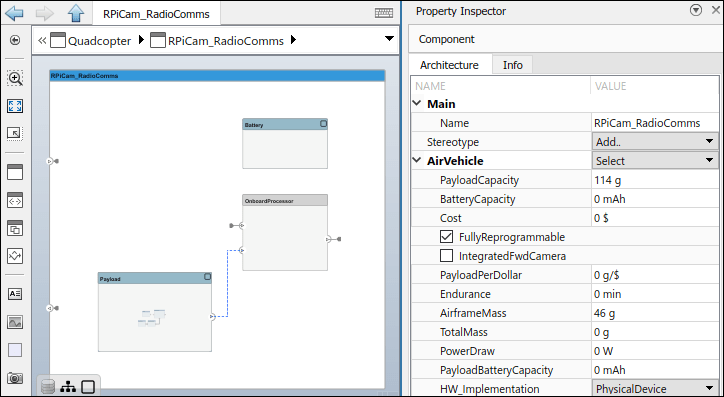
AirVehicle 스테레오타입은 컴포넌트에 적용되며 기본 스테레오타입 HW_Implementation에서 상속됩니다. AirVehicle 스테레오타입 아래의 각 속성은 Type으로 정의된 데이터형으로 지정되며, 일부 속성은 Unit으로 정의된 공학 단위를 포함합니다. 쿼드콥터의 물리 아키텍처의 컴포넌트에 AirVehicle 스테레오타입을 적용하여 이러한 컴포넌트를 특정 속성값으로 정교화할 수 있습니다. 속성 인스펙터에서 RPiCam_RadioComms 컴포넌트에 대해 이러한 속성값을 정의합니다.
쿼드콥터 설계의 항속시간을 계산하기 위해 롤업 분석(Roll-Up Analysis) 수행하기
Instantiate Architecture Model 툴을 열려면 System Composer 툴스트립에서 [Modeling] > [Analysis Model]로 이동합니다. QuadcopterPhysicalProperties 프로파일 아래의 모든 스테레오타입을 선택합니다. 열기 ![]() 버튼을 클릭한 다음 분석 함수 파일
버튼을 클릭한 다음 분석 함수 파일 calculateEndurance.m을 엽니다. [Iteration Order]에 대해 Bottom-up을 선택합니다. [Instantiate]를 클릭합니다.

Analysis Viewer 툴에서 분석 함수를 사용하여 BatteryCapacity, PayloadBatteryCapacity, PowerDraw, TotalMass와 같은 롤업(roll-up) 속성값을 계산할 수 있습니다. 분석 함수는 성능 특성 PowerDraw와 Endurance도 계산합니다. 자세한 내용은 Analysis Function Constructs 항목을 참조하십시오. [Analyze]를 클릭하여 노란색으로 강조 표시된 분석 결과를 확인합니다.
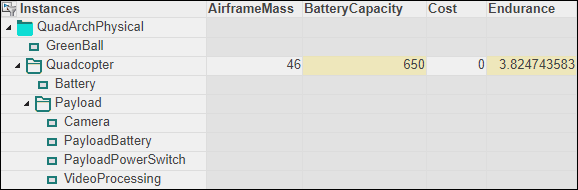
이 특정 구성에 대한 Endurance 속성은 다음 방정식을 사용하여 약 3.825로 계산됩니다.
Variant Component 블록 GCS 및 Quadcopter의 Variant 구성을 변경한 다음 분석 함수를 다시 실행하여 Endurance를 계산하고 여러 제안된 설계를 비교할 수 있습니다.
참고 문헌
[1] Faisandier, Alan, and Rick Adcock. “Physical Architecture.” Guide to the Systems Engineering Body of Knowledge (SEBoK) v. 2.7, released October 31, 2022. https://sebokwiki.org/wiki/Physical_Architecture.
참고 항목
블록
툴
- [Profile Editor] | [Instantiate Architecture Model] | Requirements Editor (Requirements Toolbox) | [Analysis Viewer]
함수
systemcomposer.profile.editor|slreq.editor(Requirements Toolbox) |sl_refresh_customizations