선형화 기법
직접 선형화, 평균화 방법, 시계열을 통한 추정 방법을 사용하여 전기 모델을 선형화합니다.
도움말 항목
- Linearization Techniques for Control Design
Linearize Simscape™ models to support stability analysis and control design.
- Linearize Models with Converters Using Averaged Switching
Linearize models with converter blocks using averaged switching in Simscape Electrical™ software.
- Estimate Linear Models from Simulation Results
Use Simulink® Control Design™ software to insert signals into a simulation for frequency response estimation.
추천 예제
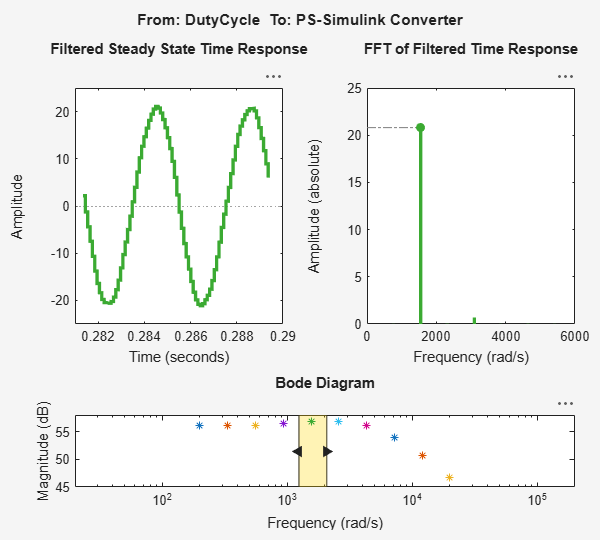
Linearize DC-DC Converter Model
Linearize a model of a DC-DC converter using averaged switching or an average-value converter.

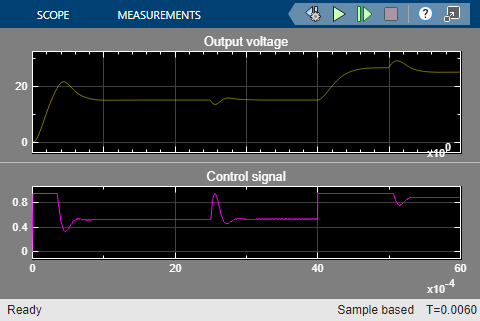
Design PI Controller for DC-DC Converter
Design a PI controller for a DC-DC converter using classical control theory. Alternatively, you can use Steady State Manager, Model Linearizer, Frequency Response Estimator, or PID tuner apps to streamline the design.
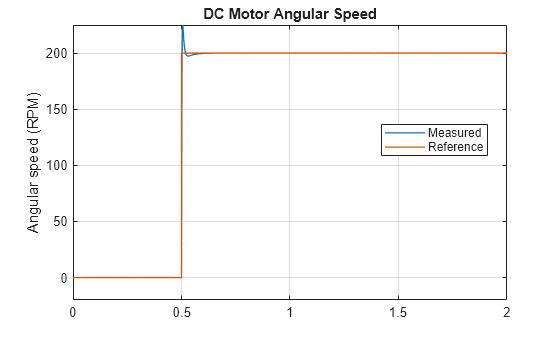
Design PID Control for DC Motor Using Classical Control Theory
Design a PID controller for a DC Motor using classical control theory. Alternatively, you can use Steady State Manager, Model Linearizer, Frequency Response Estimator, or PID tuner apps to streamline the design.
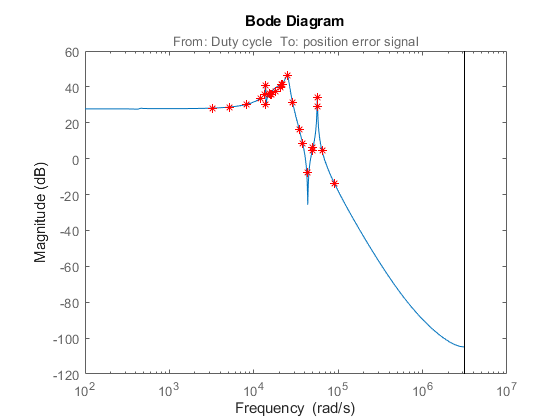
부스트 컨버터에 대한 전달 함수 모델 추정하기
이 예제에서는 주파수 응답 데이터에서 전달 함수를 추정하는 방법을 보여줍니다.

LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape Electrical model using a linear parameter varying model.

Frequency Response Estimation for Power Electronics Model Using Pseudorandom Binary Signal
Identify a frequency-domain model for a high-frequency power electronics system using a PRBS input signal at command line.

Design PID Controller Using Simulated I/O Data
Tune a PID controller for plants that cannot be linearized. You use PID Tuner to identify a plant for your model. Then tune the PID controller using the identified plant. Identifying a plant model in the app requires System Identification Toolbox™ software.
Design PID Controller Using Plant Frequency Response Near Bandwidth
Tune a PID Controller for a plant that does not linearize using the Frequency Response Based PID Tuner.

Design Controller for Boost Converter Model Using Frequency Response Data
To design a controller for a Simscape Electrical model that cannot be linearized, you can estimate the frequency response of your plant and import this estimated data into PID Tuner.

Design PID Controllers for Three-Phase Rectifier Using Closed-Loop PID Autotuner Block
Tune controllers for a Vienna-rectifier-based power factor corrector using the Closed-Loop PID Autotuner block.
Specify Linearization for Model Components Using System Identification
You can use System Identification Toolbox™ software to identify a linear system for a model component that does not linearize well, and use the identified system to specify its linearization.
Control of a Linear Electric Actuator Using Control System Tuner
Use Control System Tuner to tune a multiloop control system modeled in Simulink.

Tune Field-Oriented Controllers Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for a permanent magnet synchronous machine in one simulation.

Tune Field-Oriented Controllers for an Asynchronous Machine Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for an asynchronous machine in one simulation.

Tune Field-Oriented Controllers for a PMSM Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for a PMSM-based electrical-traction drive in one simulation.

Tune Field-Oriented Controllers Using SYSTUNE
Tune a field-oriented controller for an asynchronous machine in one simulation.

종속 연결 PI 제어기로 BLDC 모터 속도 제어하기
Closed-Loop PID Autotuner 블록을 사용하여 종속 연결로 구성된 2개의 PI 제어기를 조정합니다.

Tune PID Controller in Real Time Using Closed-Loop PID Autotuner Block
Tune a single-loop PID controller in real time by injecting sinusoidal perturbation signals at the plant input and measuring the plant output during a closed-loop experiment.