Rigid Transform
Fixed spatial relationship between frames

Libraries:
Simscape /
Multibody /
Frames and Transforms
Description
The Rigid Transform block specifies and maintains a fixed spatial relationship between two frames during simulation. The spatial relationship can include a translation and a rotation.
The block has various methods to specify the position and orientation of the follower frame with respect to the base frame. For more information, see Rotation and Translation.
Examples
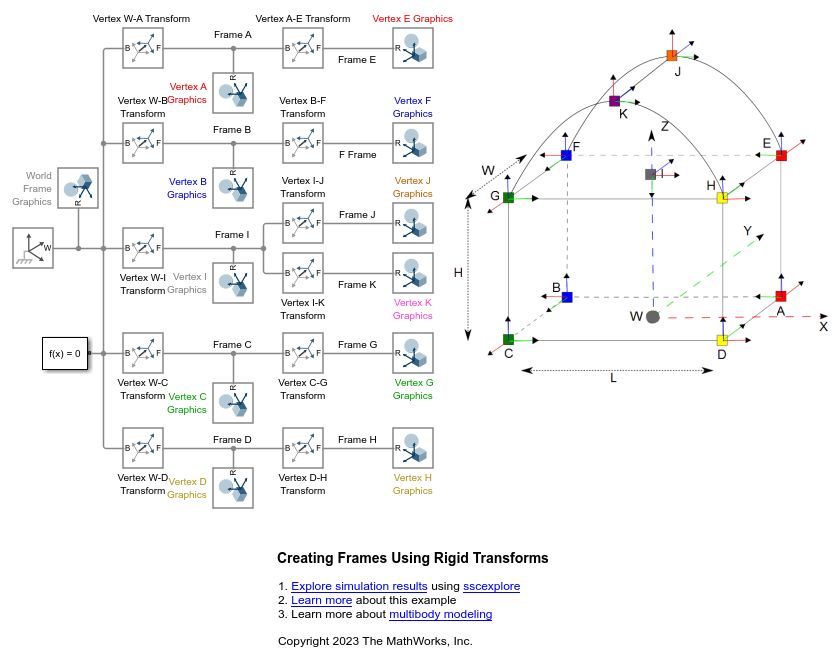
Creating Frames Using Rigid Transforms
The correspondence of coordinate frames to connection lines and frame ports. It highlights the Rigid Transform block as the fundamental method to rigidly relate nonidentical frames. The network reference frame is the world frame, located at the center of the bottom face of the cube. The other frames are the frames at the eight vertices of the cube, one at the center of the top face, and two on the upper curved section.
Ports
Frame
Frame with respect to which you specify the transforms.
Frame to which you apply the transforms.
Parameters
Rotation
Method to use to specify the relative rotation between the base and
follower frames. Set the parameter to None to
constrain the base and follower frames to the same orientation.
Follower frame axis used to align with the base frame axis set by the Pair 1: Base parameter, specified as an orthogonal axis of the follower frame. The follower frame rotates with respect to the base frame to enable the alignment between the selected axes of the base and follower frames.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Aligned
Axis.
Base frame axis to align with the follower frame specified by the Pair 1: Follower, specified as an orthogonal axis of the base frame.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Aligned
Axis.
Base frame axis to align with the follower frame specified by the Pair 2: Follower, specified as an orthogonal axis of the follower frame. The follower frame rotates with respect to the base frame to enable the alignment between the selected axes of the base and follower frames.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Aligned
Axis.
Base frame axis used to let the follower frame axis set in the Pair2: Follower parameter to align with, specified as an orthogonal axis of the base frame. The axis choices for Pair 2 depend on the Pair 1 axis selections.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Aligned
Axis.
Axis of the relative rotation, specified as an orthogonal axis of the base frame.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Standard
Axis.
Angle of the relative rotation, specified as a scalar. The angle indicates the rotation of the follower frame with respect to the base frame about the specified axis.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Standard
Axis.
Axis of the relative rotation, specified as a 3-by-1 unit vector. The vector is dimensionless and indicates the rotational axis resolved in the base frame.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Arbitrary
Axis.
Angle of the relative rotation, specified as a scalar. The angle indicates the rotation of the follower frame with respect to the base frame about the axis specified by the Axis parameter.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Arbitrary
Axis.
Frame whose axes to rotate the follower frame about, specified as
Follower Axes or Base
Axes. If you set the parameter to
Follower Axes, the follower frame rotates
about its own axes, and the follower frame changes the orientation with
each successive rotation. If you set the parameter to Base
Axes, the follower frame rotates about the fixed base
frame axes. See Rotational Measurements for more information.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Rotation
Sequence.
Sequence of the rotation axis for three successive elementary rotations. See Rotation Sequence Measurements for more information.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Rotation
Sequence.
Angles for elementary rotations, specified as a 3-by-1 vector. See Rotation Sequence Measurements for more information.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Rotation
Sequence.
Relative rotation, specified as a 3-by-3 matrix. The matrix must be orthogonal and have determinant 1. See Rotational Measurements for more information.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to Rotation
Matrix.
Relative rotation, specified as a vector in quaternion parameterization. See Rotational Measurements for more information about the quaternion.
Dependencies
To enable this parameter, under Rotation, set
Method parameter to
Quaternion.
Translation
Method to use to specify the relative translation between the base and follower frames. The table summarizes the available options.
| Method | Description |
|---|---|
None | Make base and follower frames coincident. This method requires no parameters. |
Cartesian | Specify a 3-D translation in terms of Cartesian coordinates |
Standard Axis | Specify a 1-D translation along the x, y, or z axis |
Cylindrical | Specify a 3-D translation in terms of cylindrical coordinates |
Cartesian AxisSpecify the Offset of the follower frame with respect to the base frame. This is the 3-D translation vector that brings the base frame into coincidence with the follower frame. Select or enter a physical unit.
Standard AxisSpecify the offset of the follower frame with respect to the base frame along the base frame x, y, or z axis. Select or enter a physical unit.
Parameter Description Axis Axis the follower frame translates along Offset Translation of the follower frame with respect to the base frame along the specified axis CylindricalSpecify in cylindrical coordinates the translation that brings the base frame into coincidence with the follower frame. Select or enter a physical unit.
Parameter Description Radius Distance between the origin of the follower frame and the z axis of the base frame. This is the cylindrical radius coordinate. Theta Rotation angle of the line connecting base and follower frame origins with respect to the base frame x axis. This is the cylindrical azimuth coordinate. Z Offset Distance between base and follower frame origins along the base frame z axis. This is the cylindrical length coordinate.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2012a
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다:
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
사이트 성능 최적화 방법
최고의 사이트 성능을 위해 중국 사이트(중국어 또는 영어)를 선택하십시오. 현재 계신 지역에서는 다른 국가의 MathWorks 사이트 방문이 최적화되지 않았습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)