Model Discretizer
What Is the Model Discretizer?
Model Discretizer selectively replaces continuous Simulink® blocks with discrete equivalents. Discretization is a critical step in digital controller design and for hardware in-the-loop simulations.
You can use the Model Discretizer to:
Identify a model's continuous blocks
Change a block's parameters from continuous to discrete
Apply discretization settings to all continuous blocks in the model or selected blocks
Create variant subsystems that contain multiple discretization candidates along with the original continuous block(s)
Switch among the different discretization candidates and evaluate the resulting model simulations
The Model Discretizer does not support masked subsystems.
Requirements
To use Model Discretizer
You must have a Control System Toolbox™ license, Version 5.2 or later.
Make sure your model does not contain any obsolete blocks and is upgraded to the current Simulink version. For more information, see Model Upgrades
You must convert configurable subsystem blocks in existing models to Variant Subsystem. For more information, see Convert Configurable Subsystem to Variant Subsystem.
Discretize a Model with the Model Discretizer
This example shows how to discretize the f14 model using the Model Discretizer.
model='f14';
open_system(model)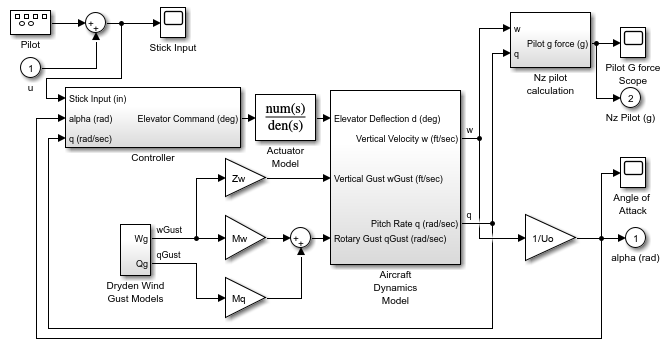
Model Discretizer Workflow
To discretize a model:
Start Model Discretizer
To open the tool, in the Simulink Editor, on the Apps tab, under Apps, under Control Systems, click Model Discretizer.
The Simulink Model Discretizer opens.
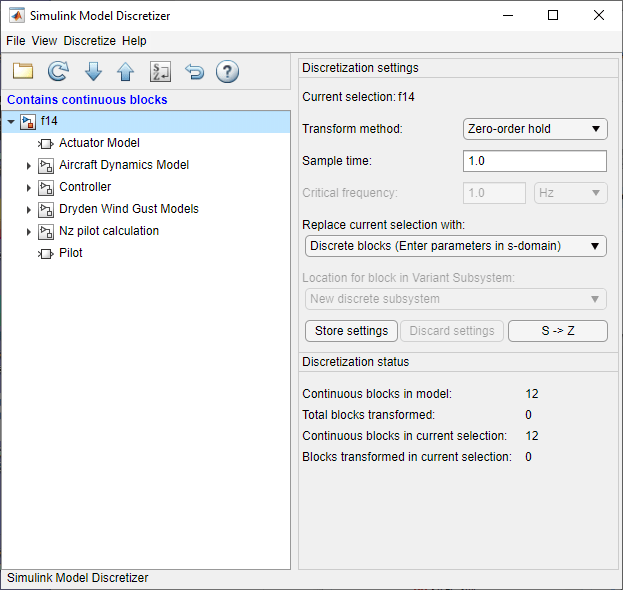
Alternatively, you can open Model Discretizer from the MATLAB® Command Window using the slmdldiscui function.
This command sequence opens the Simulink Model Discretizer
window with the f14 model:
openExample('f14');
slmdldiscui('f14')
To open a new model or library from Model Discretizer, select File > Load model.
Specify the Transform Method
The transform method specifies the type of algorithms used in the discretization. For more information on the different transform methods, see the Control System Toolbox.
The Transform method list contains the following options:
| Transform Method | Description |
|---|---|
| Zero-order hold on the inputs. |
| Linear interpolation of inputs. |
| Bilinear (Tustin) approximation. |
| Tustin approximation with frequency prewarping. |
| Matched pole-zero method (for SISO systems only). |
Specify the Sample Time
Enter the sample time in the Sample time field. For the Model Discretizer, this value must be numeric.
You can specify an offset time by entering a two-element vector for discrete blocks or variant subsystems. The first element is the sample time and the second element is the offset time. For example, an entry of [1.0 0.1] would specify a 1.0 second sample time with a 0.1 second offset. If no offset is specified, the default is zero.
You can enter workspace variables when discretizing blocks in the s-domain. See Discrete blocks (Enter parameters in s-domain).
Specify the Discretization Method
Specify the discretization method in the Replace current selection with field. The options are
| Discretization Method | Description |
|---|---|
Creates a discrete block whose parameters are retained from the corresponding continuous block. | |
Creates a discrete block whose parameters are “hard-coded“ values placed directly into the block's dialog box. | |
Create multiple discretization candidates using s-domain values for the current selection. | |
Create multiple discretization candidates in z-domain for the current selection. |
Discrete blocks (Enter parameters in s-domain). Creates a discrete block whose parameters are retained from the corresponding continuous block. The sample time and the discretization parameters are also on the block's parameter dialog box.
The block is implemented as a masked discrete block that uses c2d (Control System Toolbox) to transform the
continuous parameters to discrete parameters in the mask initialization
code.
These blocks have the unique capability of reverting to continuous behavior if
the sample time is changed to zero. Entering the sample time as a workspace
variable ('Ts', for example) allows for easy changeover from
continuous to discrete and back again. See Specify the Sample Time.
Note
If you generated code from a model, parameters are not tunable when
Default parameter behavior is set to
Inlined in the model's Configuration
Parameters dialog box.
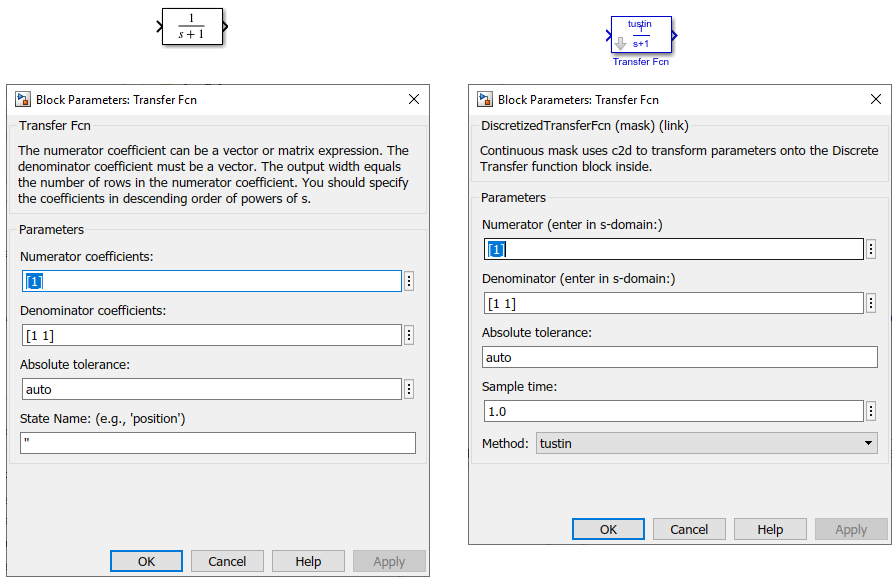
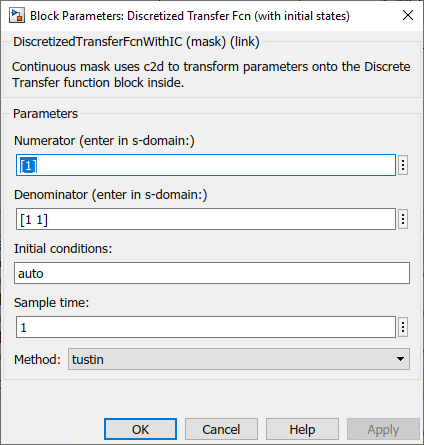
The following figure shows a continuous Transfer Function block next to a Transfer Function block that has been discretized in the s-domain with the Tustin transform method. The block parameters dialog box for each block appears below the block.
Discrete blocks (Enter parameters in z-domain). Creates a discrete block whose parameters are “hard-coded” values placed
directly into the block's dialog box. Model Discretizer uses the c2d (Control System Toolbox) function to obtain the
discretized parameters, if needed.
For more help on the c2d (Control System Toolbox) function, type the
following in the Command Window:
help c2d
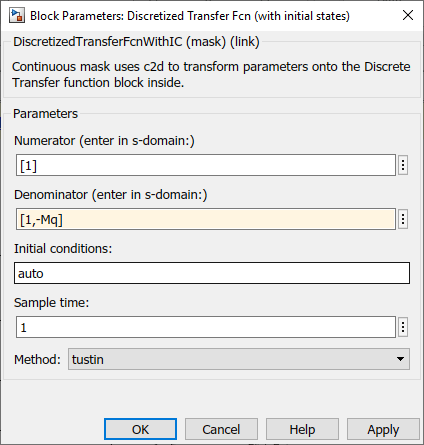
The following figure shows a continuous Transfer Function block next to a Transfer Function block that has been discretized in the z-domain. The block parameters dialog box for each block appears below the block.

Note
If you want to recover exactly the original continuous parameter values after the Model Discretization session, you should enter parameters in the s-domain.
Variant subsystem (Enter parameters in s-domain). Create multiple discretization candidates using s-domain values for the current selection. Creates a discrete block whose parameters are retained from the corresponding continuous block.
The Location for block in Variant Subsystem field becomes active when this option is selected. This option allows you to either create a new variant subsystem.
Variant subsystem (Enter parameters in z-domain). Create multiple discretization candidates in z-domain for the current selection. Creates a discrete block whose parameters are “hard-coded“ values placed directly into the block's dialog box.
The Location for block in Variant Subsystem field becomes active when this option is selected. This option allows you to either create a new variant subsystem.
Discretize the Blocks
To discretize blocks that are linked to a library, you must either discretize the blocks in the library itself or disable the library links in the model window.
You can open the library from Model Discretizer by selecting Load model from the File menu.
You can disable the library links by right-clicking on the block and selecting Go to Library > Disable Link.
There are two methods for discretizing blocks:
Select Blocks and Discretize
Select a block or blocks in the Model Discretizer tree view pane.
To choose multiple blocks, press and hold the Ctrl button on the keyboard while selecting the blocks.
Note
You must select blocks from the Model Discretizer tree view. Clicking blocks in the editor does not select them for discretization.
Select Discretize current block from the Discretize menu if a single block is selected or select Discretize selected blocks from the Discretize menu if multiple blocks are selected.
You can also discretize the current block by clicking the Discretize button, shown below.

Store the Discretization Settings and Apply Them to Selected Blocks in the Model
Enter the discretization settings for the current block.
Click Store Settings.
This adds the current block with its discretization settings to the group of preset blocks.
Repeat steps 1 and 2, as necessary.
Select Discretize preset blocks from the Discretize menu.
Deleting a Discretization Candidate from a Variant Subsystem
You can delete a discretization candidate from a variant subsystem by selecting it in the Location for block in Variant Subsystem field and clicking the Delete button.
Undoing a Discretization
To undo a discretization, click the Undo discretization button.
Alternatively, you can select Undo discretization from the Discretize menu.
This operation undoes discretizations in the current selection and its children. For example, performing the undo operation on a subsystem will remove discretization from all blocks in all levels of the subsystem's hierarchy.
View the Discretized Model
Model Discretizer displays the model in a hierarchical tree view.
Viewing Discretized Blocks
The block's icon in the tree view becomes highlighted with a “z” when the block has been discretized.
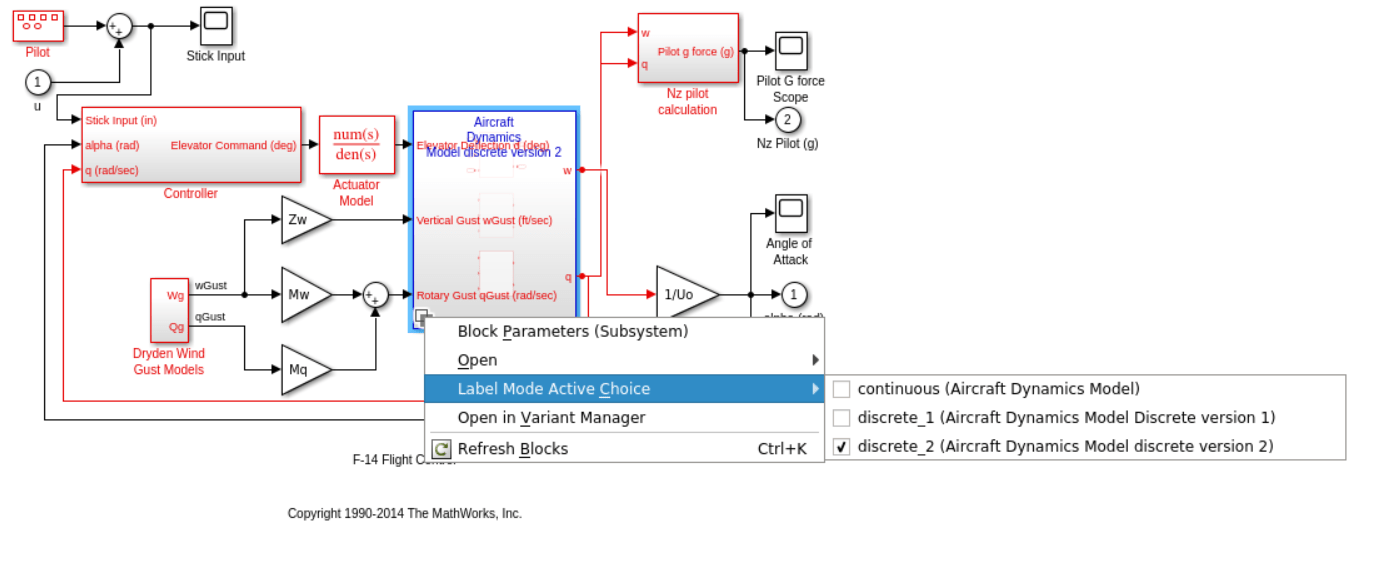
The following figure shows that the Aircraft Dynamics Model subsystem has been discretized into a variant subsystem with two discretization candidates.
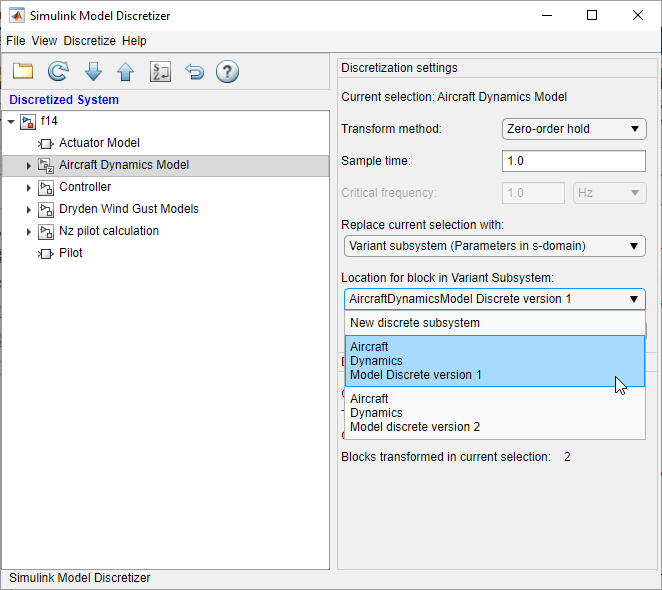
The other blocks in this f14 model have not been discretized.
The following figure shows the Aircraft Dynamics Model subsystem of the f14
example model after discretization into a variant subsystem containing the original
continuous model and two discretization candidates.
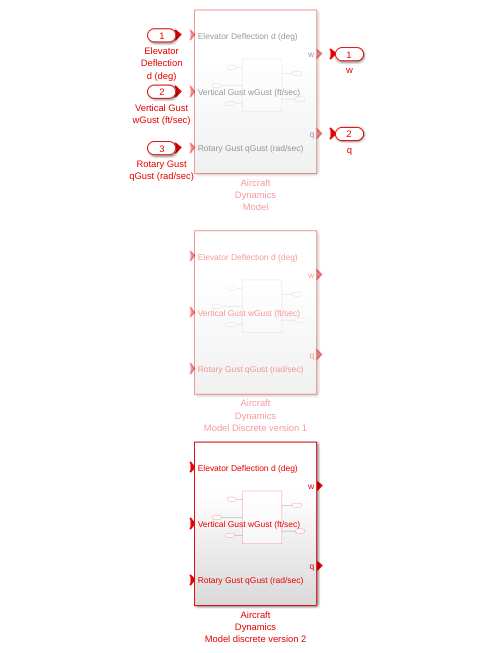
The following figure shows the Aircraft Dynamics Model variant subsystem with the two discretization candidates.
Refreshing Model Discretizer View of the Model
To refresh the Model Discretizer tree view of the model when the model has been changed, click the Refresh button.
Alternatively, you can select View > Refresh.
Discretize Blocks from the Simulink Model
You can replace continuous blocks in a Simulink software model with the equivalent blocks discretized in the s-domain using the Discretizing library.
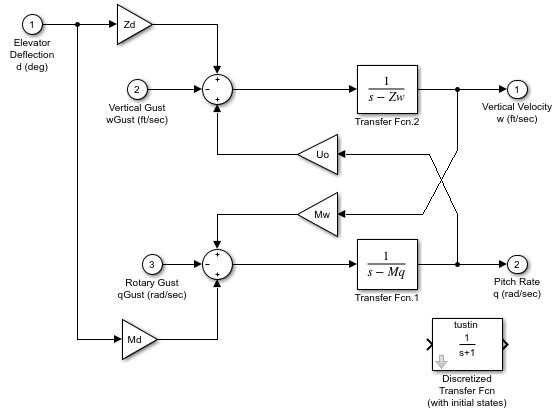
The procedure below shows how to replace a continuous Transfer Fcn block in the Aircraft Dynamics Model subsystem of the f14 model with a discretized Transfer Fcn block from the Discretizing Library. The block is discretized in the s-domain with a zero-order hold transform method and a two second sample time.
Open the
f14model.Open the Aircraft Dynamics Model subsystem in the
f14model.
Open the Discretizing library window.
Enter
discretizingat the MATLAB command prompt.The Library: discretizing window opens.

This library contains s-domain discretized blocks.
Add the Discretized Transfer Fcn (with initial states) block to the f14/Aircraft Dynamics Model window.
Click the Discretized Transfer Fcn block in the Library: discretizing window.
Drag it into the f14/Aircraft Dynamics Model window.
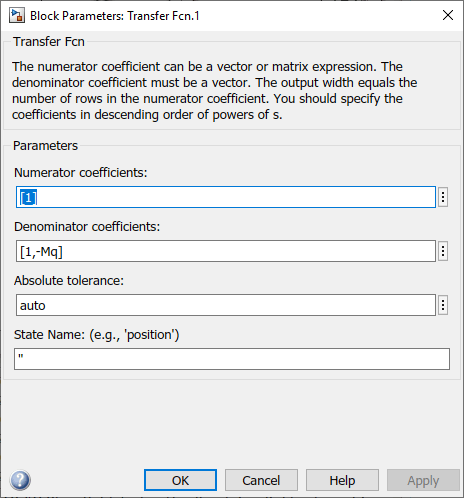
Open the parameter dialog box for the Transfer Fcn.1 block.
Double-click the Transfer Fcn.1 block in the f14/Aircraft Dynamics Model window.
The Block Parameters: Transfer Fcn.1 dialog box opens.
Open the parameter dialog box for the Discretized Transfer Fcn block.
Double-click the Discretized Transfer Fcn block in the f14/Aircraft Dynamics Model window.
The Block Parameters: Discretized Transfer Fcn dialog box opens.
Copy the parameter information from the Transfer Fcn.1 block dialog box to the Discretized Transfer Fcn block's dialog box.
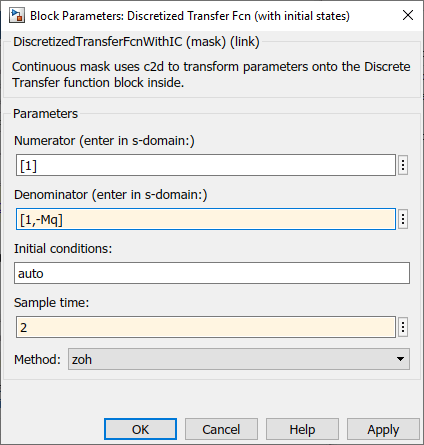
Enter
2in the Sample time field.Select
zohfrom the Method dropdown list.The parameter dialog box for the Discretized Transfer Fcn now looks like this.
Click OK.
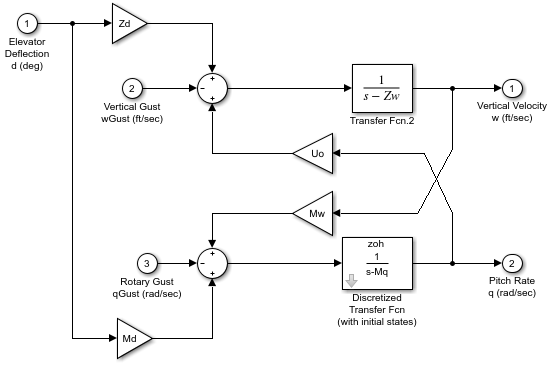
The f14/Aircraft Dynamics Model window now looks like this.

Delete the original Transfer Fcn.1 block.
Click the Transfer Fcn.1 block.
Press the Delete key.
The f14/Aircraft Dynamics Model window now looks like this.

Add the Discretized Transfer Fcn block to the model.
Click the Discretized Transfer Fcn block.
Drag the Discretized Transfer Fcn block into position to complete the model.
The f14/Aircraft Dynamics Model window now looks like this.
Discretize a Model with the sldiscmdl Function
Use the sldiscmdl function to discretize
Simulink software models from the MATLAB Command Window. You can specify the transform method, the sample time, and
the discretization method with the sldiscmdl function.
For example, the following command discretizes the f14 model in the s-domain with a 1-second sample time using a zero-order hold transform method:
sldiscmdl('f14',1.0,'zoh')