Gear Box
기계 시스템의 기어 박스

라이브러리:
Simscape /
Foundation Library /
Mechanical /
Mechanisms
설명
Gear Box 블록은 유성 기어가 아니며 고정 기어비를 갖는 이상적인 기어 박스를 나타냅니다. 기어비는 출력 샤프트의 각속도에 대한 입력 샤프트의 각속도의 비율로 결정됩니다.
기어 박스는 다음 방정식으로 설명됩니다.
여기서 각각은 다음과 같습니다.
ωS는 입력 샤프트 각속도입니다.
ωO는 출력 샤프트 각속도입니다.
N은 기어비입니다.
TS는 입력 샤프트의 토크입니다.
TO는 출력 샤프트의 토크입니다.
PS는 입력 샤프트의 파워입니다.
PO는 출력 샤프트의 파워입니다. PO 계산에는 마이너스 기호가 있습니다. 네트워크 규칙 중 하나는 에너지 보존 포트를 통해 흐르는 파워가 회로에서 제거(소모)되면 양이고, 컴포넌트가 파워를 생성하여 시스템에 추가하면 음이라는 것입니다.
연결부 S 및 O는 각각 박스의 입력 샤프트 및 출력 샤프트와 연결되는 회전 기계 에너지 보존 포트입니다. 블록에서 양의 방향은 S에서 기준점 방향이며 기준점에서 O 방향입니다.
변수
시뮬레이션 전에 블록 변수의 우선 순위와 초기 목표값을 설정하려면 블록 대화 상자 또는 속성 인스펙터의 초기 목표값 섹션을 사용합니다. 자세한 내용은 Set Priority and Initial Target for Block Variables 항목을 참조하십시오.
공칭 값은 모델에서 변수의 예상 크기를 지정하는 방법을 제공합니다. 공칭 값을 기반으로 시스템 스케일링을 사용하면 시뮬레이션 강인성이 향상됩니다. 공칭 값은 다른 소스에서 가져올 수 있으며, 그중 하나가 블록 대화 상자 또는 속성 인스펙터의 공칭 값 섹션입니다. 자세한 내용은 Modify Nominal Values for a Block Variable 항목을 참조하십시오.
예제
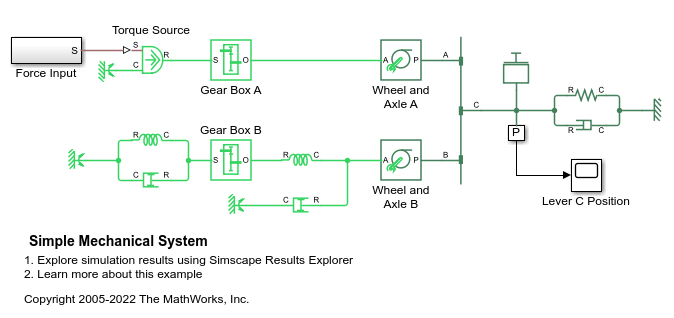
단순한 기계 시스템
이 예제는 회전 운동과 병진 운동을 연결하는 시스템의 모델을 보여줍니다. 합산 레버는 질량, 점성 마찰, 조인트 C에 연결된 스프링으로 구성된 부하를 구동합니다. 조인트 B는 휠과 차축, 기어 박스를 통해 기준점에 연결된 두 개의 회전 스프링에 매달려 있습니다. 조인트 A는 기어 박스, 휠 및 차축 메커니즘을 통해 토크 소스에 연결되어 있습니다.
포트
보존
파라미터
확장 기능
버전 내역
R2007a에 개발됨