군지연 및 위상 지연
정의에 따르면 필터의 군지연은 필터 위상 응답의 음의 1계 도함수입니다. 가 필터의 복소수 값 주파수 응답이고 가 의 연속(펼쳐진) 위상인 경우 군지연은 다음과 같습니다.
.
필터의 위상 지연은 위상을 주파수로 나눈 값의 음수 값입니다.
.
FIR 필터
차수가 인 대칭 선형 위상 FIR 필터의 복소 주파수 응답은 으로 표현할 수 있으며, 여기서 는 실수 값 진폭입니다. 이 필터 유형의 경우 군지연은 이며, 전체 주파수 범위에 걸쳐 일정합니다. 반면, 위상 지연은 가 양수인 가장 낮은 주파수에서만 일정합니다.
대칭적인 계수 벡터를 갖는 4차 FIR 필터가 선형 위상을 갖는지 확인합니다.
fs = 2000; fc = 200; N = 4; b = fir1(N,fc/(fs/2)); islinphase(b,1)
ans = logical
1
grpdelay 함수를 사용하여 필터의 군지연을 계산합니다. 군지연은 필터 차수의 절반입니다.
grpdelay(b,1,[],fs)
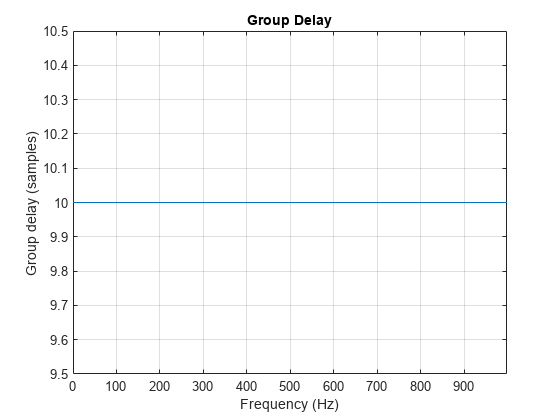
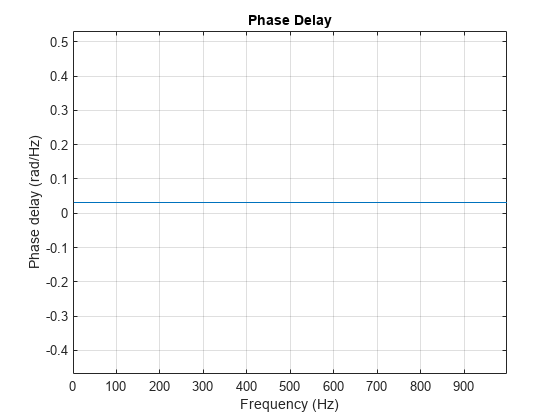
phasedelay 함수를 사용하여 필터의 위상 지연을 계산합니다. 이 선형 위상 FIR 필터의 경우, 위상 지연과 군지연은 전체 주파수 범위에 걸쳐 일정합니다.
phasedelay(b,1,[],fs)
IIR 필터
필터의 주파수 응답이 로 표현될 수 있을 때 그 필터는 선형 위상을 가지며, 여기서 는 상수입니다. 안정적인 IIR 필터는 주파수 응답을 이런 식으로 표현할 수 없으므로 선형 위상을 갖지 않습니다.
4차 버터워스 저역통과 필터가 선형 위상을 갖지 않는 것을 확인합니다.
[b,a] = butter(N,fc/(fs/2)); islinphase(b,a)
ans = logical
0
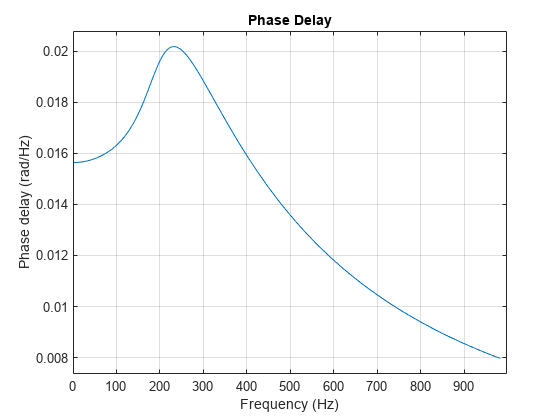
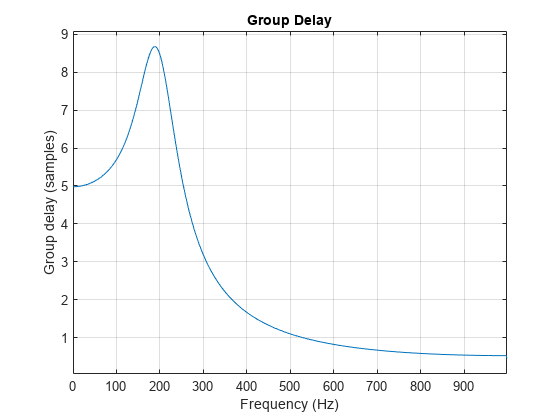
버터워스 저역통과 필터의 군지연과 위상 지연을 플로팅합니다. IIR 필터는 선형 위상을 갖지 않으므로 군지연과 위상 지연이 주파수에 걸쳐 일정하지 않습니다. 군지연 플롯과 위상 지연 플롯에서 최댓값은 필터 차단 주파수 주위에 위치합니다.
grpdelay(b,a,[],fs)
phasedelay(b,a,[],fs)