tfestimate
전달 함수 추정값
구문
설명
txy = tfestimate(x,y)x와 출력 신호 y 간의 전달 함수 추정값을 구합니다.
x와y가 모두 벡터인 경우 길이가 같아야 합니다.두 신호 중 하나는 행렬이고 다른 하나는 벡터인 경우, 벡터의 길이는 행렬에 포함된 행 개수와 동일해야 합니다. 이 함수는 벡터를 확장하고 열별 전달 함수 추정값으로 구성된 행렬을 반환합니다.
x와y가 행의 개수가 같지만 열의 개수가 다른 행렬인 경우txy는 모든 입력 신호와 출력 신호를 결합하는 MIMO(다중 입력/다중 출력) 전달 함수입니다.txy는 3차원 배열입니다.x는 m개의 열을 가지고y는 n개의 열을 가지는 경우,txy는 n개의 열과 m개의 페이지를 가집니다. 자세한 내용은 전달 함수 항목을 참조하십시오.x와y가 같은 크기의 행렬인 경우,tfestimate는 각 열에 대해 연산을 수행합니다. 즉,txy(:,n) = tfestimate(x(:,n),y(:,n))입니다. MIMO 추정값을 구하려면 인수 목록에"mimo"를 추가하십시오.
txy = tfestimate(___,"mimo")
[___] = tfestimate(___,는 이름-값 인수를 사용하여 추가 옵션을 지정합니다. 옵션으로는 전달 함수 추정량과 전달 함수 추정값을 플로팅할 대상 부모 컨테이너가 포함됩니다. 이러한 인수를 위에 열거된 입력 구문에 추가할 수 있습니다.Name=Value)
tfestimate(___)에 출력 인수를 지정하지 않으면 현재 Figure 창에 전달 함수 추정값을 플로팅합니다.
예제
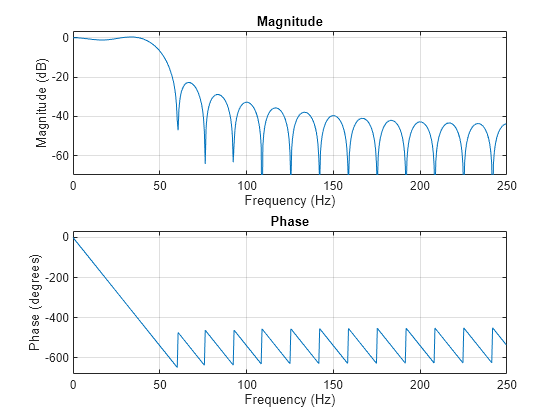
두 시퀀스 x와 y 간의 전달 함수 추정값을 계산하고 플로팅합니다. 시퀀스 x는 백색 가우스 잡음으로 구성되어 있습니다. y는 rad/sample의 정규화된 차단 주파수를 갖는 30차 저역통과 필터를 사용하여 x를 필터링한 결과입니다. 사각 윈도우를 사용하여 필터를 설계합니다. 전달 함수 추정값에 대해 샘플 레이트가 500Hz이고 길이가 1024인 해밍 윈도우를 지정합니다.
h = fir1(30,0.2,rectwin(31)); x = randn(16384,1); y = filter(h,1,x); fs = 500; tfestimate(x,y,1024,[],[],fs)

전달 함수가 필터의 주파수 응답에 근사하는지 확인합니다.
freqz(h,1,[],fs)
변수로 전달 함수 추정값을 반환하고 추정값의 절댓값을 데시벨 단위로 플로팅하여 동일한 결과를 구합니다.
[Txy,f] = tfestimate(x,y,1024,[],[],fs); plot(f,mag2db(abs(Txy)))

간단한 SISO(단일 입력 단일 출력) 시스템에 대한 전달 함수를 추정하고 이를 정의와 비교합니다.
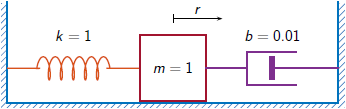
1차원의 이산시간 진동 시스템은 단위 탄성 상수를 갖는 스프링으로 벽에 연결된 단위 질량 (단위: kg)으로 구성됩니다. 센서가 질량의 가속도 를 Hz로 샘플링합니다. 댐퍼는 감쇠 상수 kg/s를 사용하여 속도에 비례하는 힘을 가해 질량의 운동을 저해합니다.
2000개의 시간 샘플을 생성합니다. 샘플링 간격을 로 정의합니다.
Fs = 1; dt = 1/Fs; N = 2000; t = dt*(0:N-1); b = 0.01;
시스템은 다음 상태공간 모델로 설명할 수 있습니다.
여기서 는 상태 벡터로, 과 는 질량의 위치와 속도를 각각 나타내고, 는 구동력이며, 는 측정 출력입니다. 상태공간 행렬은 다음과 같습니다.
는 단위 행렬이고, 연속시간 상태공간 행렬은 다음과 같습니다.
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(size(A)))*Bc; C = [-1 -b]; D = 1;
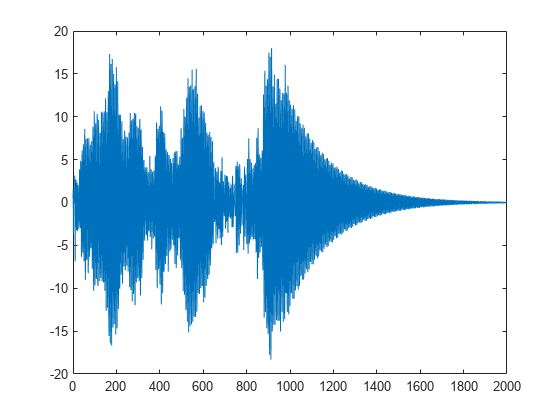
질량은 측정 구간의 절반에 대한 임의의 입력값으로 구동됩니다. 상태공간 모델을 사용하여 모든 초기 상태값이 0인 시공간 시스템의 변화를 계산합니다. 질량의 가속도를 시간의 함수로 플로팅합니다.
rng("default") u = zeros(1,N); u(1:N/2) = randn(1,N/2); y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)
시스템의 전달 함수를 주파수의 함수로 추정합니다. 2048개의 DFT 점을 사용하고 형태 인자가 15인 카이저 윈도우를 지정합니다. 인접 세그먼트 간에 디폴트 중첩값을 적용합니다.
nfs = 2048; wind = kaiser(N,15); [txy,ft] = tfestimate(u,y,wind,[],nfs,Fs);
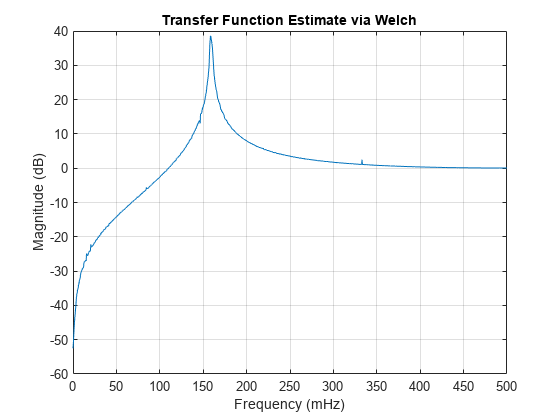
이산시간 시스템의 주파수-응답 함수는 단위원에서 계산된, 시스템의 시간 영역 전달 함수에 대한 Z 변환으로 표현할 수 있습니다. tfestimate로 계산된 추정값이 이 정의와 일치하는지 확인합니다.
[b,a] = ss2tf(A,B,C,D); fz = 0:1/nfs:1/2-1/nfs; z = exp(2j*pi*fz); frf = polyval(b,z)./polyval(a,z); plot(ft,mag2db(abs(txy))) hold on plot(fz,mag2db(abs(frf))) hold off grid ylim([-60 40])

tfestimate의 내장 기능을 사용하여 추정값을 플로팅합니다.
tfestimate(u,y,wind,[],nfs,Fs)
MIMO(다중 입력/다중 출력) 시스템에 대해 전달 함수를 추정합니다.
두 질량 양쪽에 스프링과 댐퍼를 연결하면 이상적인 1차원 이산시간 진동 시스템이 구성됩니다. 시스템 입력 배열 u는 질량에 가해지는 무작위 구동력으로 구성됩니다. 시스템 출력 배열 y는 초기 기준 위치로부터 관측된 질량의 변위를 포함합니다. 시스템은 40Hz의 Fs 레이트로 샘플링됩니다.
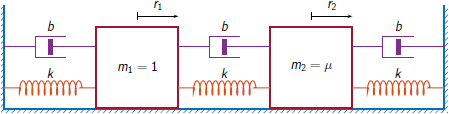
MIMO 시스템 입력, 시스템 출력 및 샘플 레이트가 포함된 데이터 파일을 불러옵니다. 예제 Frequency-Response Analysis of MIMO System에서는 이 예제에 사용된 데이터를 생성한 시스템을 분석합니다.
load MIMOdata Fs u y
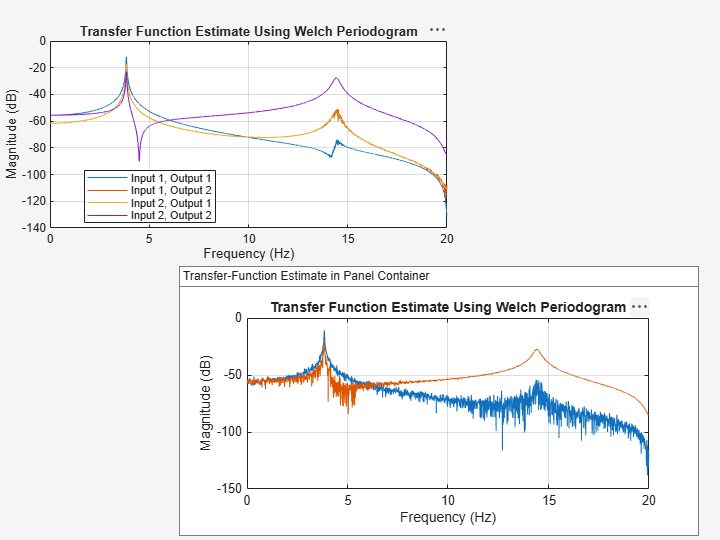
시스템 데이터와 함수 tfestimate를 사용하여 시스템의 주파수 영역 전달 함수를 추정하고 플로팅합니다. 인접 세그먼트 간의 중첩이 50%가 되도록 신호를 5000개 샘플 세그먼트로 나눕니다. 각 세그먼트에 해닝 윈도우를 적용하고 8192개 주파수 점을 사용하여 신호 세그먼트의 이산 푸리에 변환을 계산합니다. "mimo" 옵션을 선택하여 네 개의 모든 전달 함수를 생성합니다.
g = hann(5000); nfft = 8192; ol = 2500; [tXY,ft] = tfestimate(u,y,g,ol,nfft,Fs,"mimo"); tiledlayout flow for jk = 1:2 for kj = 1:2 nexttile plot(ft,mag2db(abs(tXY(:,jk,kj)))) grid on ylim([-120 0]) title("Input "+jk+", Output "+kj) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") end end

UI Figure 창을 만들고 좌표축과 패널 컨테이너를 추가합니다.
uif = uifigure(Position=[100 100 720 540]); ax = uiaxes(uif,Position=[5 280 450 240]); p = uipanel(uif,Position=[180 5 520 270], ... Title="Transfer-Function Estimate in Panel Container", ... BackgroundColor="white");
시스템에 대한 네 개 전달 함수의 추정값을 좌표축에 플로팅하고 시스템의 각 입력-출력 쌍을 패널 컨테이너에 플로팅합니다. (R2026a 이후)
tfestimate(u,y,g,ol,nfft,Fs,"mimo",Parent=ax) legend(ax,"Input "+[1 2]+", Output "+[1 2]',Location="best") tfestimate(u,y,g,ol,nfft,Fs,Parent=p)
입력 인수
이름-값 인수
출력 인수
세부 정보
알고리즘
tfestimate는 Welch의 평균화된 주기도 방법을 사용합니다. 자세한 내용은 pwelch 항목을 참조하십시오.
참고 문헌
[1] Vold, Håvard, John Crowley, and G. Thomas Rocklin. “New Ways of Estimating Frequency Response Functions.” Sound and Vibration. Vol. 18, November 1984, pp. 34–38.