usample
Generate random samples of uncertain model or element
Syntax
Description
Use usample to generate random samples of uncertain elements,
such as ureal parameters, or models containing uncertain elements, such as
uss models. Sampling replaces an uncertain element with a random specific
value of the same type that falls in the range of the uncertain element. For instance,
usample replaces a ureal parameter with random real
scalar values within the parameter range. Similarly, usample replaces an
ultidyn element with specified dynamics that fall within the specifications
of the ultidyn element.
To generate random samples of uncertain variables in an Uncertain State
Space block in a Simulink® model, see usample.
B = usample(A,N)N random samples of the uncertain elements in
A, returning a certain (that is, not uncertain) array with the
dimensions [size(A) N]. A can be:
An individual uncertain element such as a
urealparameter or aultidynelement.An uncertain model, such as a
ussorgenssmodel, that contains one or more uncertain elements.
If you omit N, then usample returns a single
sample.
[
additionally returns the specific sampled values of the uncertain elements. The values are
returned in a structure whose field names are the names of the sampled uncertain elements,
and whose values are the specific sampled values of the element. Hence,
B,SampleValues] = usample(___)B is the same as usubs(A,SampleValues). You can
obtain SampleValues for any of the previous input-argument
combinations.
Examples
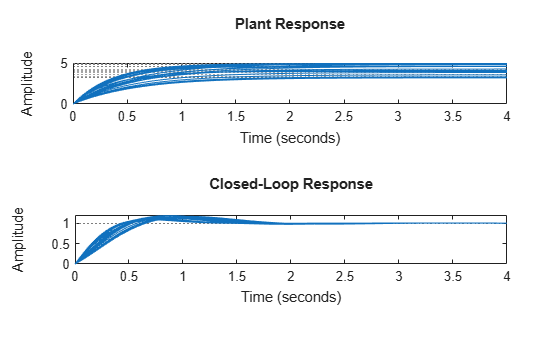
Monte Carlo analysis uses random samples to examine a range of possible responses for an uncertain system. In this example, use this approach to study the open-loop and closed-loop responses of a system with an uncertain plant model.
Create a first-order plant model with uncertain gain and time constant.
gamma = ureal("gamma",4); tau = ureal("tau",.5,"Percentage",30); P = tf(gamma,[tau 1])
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 1 states. The model uncertainty consists of the following blocks: gamma: Uncertain real, nominal = 4, variability = [-1,1], 1 occurrences tau: Uncertain real, nominal = 0.5, variability = [-30,30]%, 1 occurrences Model Properties Type "P.NominalValue" to see the nominal value and "P.Uncertainty" to interact with the uncertain elements.
Design a controller based on the nominal values of plant uncertainties and form the closed-loop system CLP. This model is a uss model containing the same uncertain elements as P.
C = pidtune(P.Nominal,"PI");
CLP = feedback(P*C,1)Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: gamma: Uncertain real, nominal = 4, variability = [-1,1], 1 occurrences tau: Uncertain real, nominal = 0.5, variability = [-30,30]%, 1 occurrences Model Properties Type "CLP.NominalValue" to see the nominal value and "CLP.Uncertainty" to interact with the uncertain elements.
Sample the plant at 20 randomly selected (gamma,tau) values. This sampling returns PSample, an array of 20 state-space models, each representing a possible plant within the uncertainty range. (For an example showing independent sampling of multiple uncertain parameters, see Sample Specified Elements of Uncertain System.)
[Psample,Values] = usample(P,20); size(Psample)
20x1 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
Values is a 20-by-1 structure array whose fields are gamma and tau and whose values are the corresponding sampled values of (gamma,tau). To sample the closed-loop system at these same values, use usubs.
CLPsample = usubs(CLP,Values);
Plot the step responses of the sampled plant and closed-loop system.
subplot(2,1,1); step(Psample,4) title("Plant Response") subplot(2,1,2); step(CLPsample,4) title("Closed-Loop Response")
To see how usample behaves with nonsymmetric uncertainty, create a real uncertain parameter with range such that the nominal value is very close to one end.
A = ureal("A",0,"Range",[-1e-4,10]);
Take 1000 samples of A. Because A is a scalar parameter, the result is 1000 numerical values.
Asample = usample(A,1000);
Plot a histogram of the sampled values.
histogram(Asample(:))
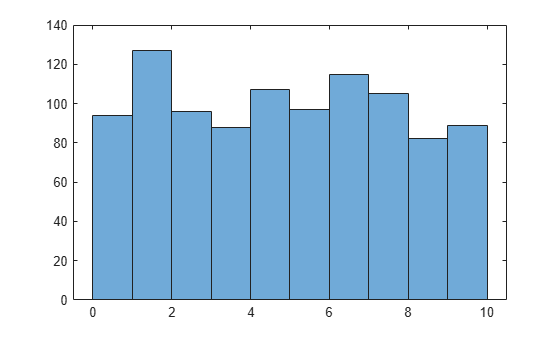
As the histogram shows, usample draws samples that are uniformly distributed across the entire uncertainty range, even for skewed ranges such as this one. Nevertheless, very highly skewed ranges can lead to poor numeric conditioning and poor results. Therefore, for meaningful results, avoid ranges where the nominal value is orders of magnitude closer to one end of the range than to the other.
When an uncertain model has multiple uncertain elements, you can sample a subset of them, allowing other elements to remain uncertain. You can also generate sample grids by sampling multiple elements independently. For instance, consider a mass-spring-damper system with uncertain mass m, damping constant c, and spring constant k. The system has the following transfer function:
.
Create an uncertain state-space model representing the mass-spring-damper system, using ureal parameters for the three uncertain coefficients.
um = ureal("m",3,"Percentage",40); uc = ureal("c",1,"Percentage",20); uk = ureal("k",2,"Percentage",30); A = tf(1,[um uc uk])
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: c: Uncertain real, nominal = 1, variability = [-20,20]%, 1 occurrences k: Uncertain real, nominal = 2, variability = [-30,30]%, 1 occurrences m: Uncertain real, nominal = 3, variability = [-40,40]%, 1 occurrences Model Properties Type "A.NominalValue" to see the nominal value and "A.Uncertainty" to interact with the uncertain elements.
First, sample the model at five values of the mass m.
[B1,SampleValues1] = usample(A,"m",5);
B15x1 array of uncertain continuous-time state-space models. Each model has 1 outputs, 1 inputs, 2 states, and the following uncertain blocks: c: Uncertain real, nominal = 1, variability = [-20,20]%, 1 occurrences k: Uncertain real, nominal = 2, variability = [-30,30]%, 1 occurrences Model Properties Type "B1.NominalValue" to see the nominal value and "B1.Uncertainty" to interact with the uncertain elements.
B1 is an array of five models, sampled at each of five values of m. The models in B1 no longer contain the uncertain element m, which has been sampled away. However, because you have not sampled c and k, the models in B1 still contain those uncertain parameters. The randomly generated values of m are returned in SampleValues1, which is an array of five structures with a single field, m. All values fall within the specified uncertainty range of m.
SampleValues1
SampleValues1=5×1 struct array with fields:
m
Next, sample at five values of m and c, or five randomly chosen (m,c) pairs. To do so, specify both elements in the same Names argument. This time, k is the only remaining uncertain parameter in the resulting models.
Names = ["m","c"]; [B2,SampleValues2] = usample(A,Names,5); B2
5x1 array of uncertain continuous-time state-space models. Each model has 1 outputs, 1 inputs, 2 states, and the following uncertain blocks: k: Uncertain real, nominal = 2, variability = [-30,30]%, 1 occurrences Model Properties Type "B2.NominalValue" to see the nominal value and "B2.Uncertainty" to interact with the uncertain elements.
B2 is also an array of five models, one at each of the randomly chosen (m,c) pairs. The structure array SampleValues2 also contains five entries, the corresponding values of m and c.
SampleValues2
SampleValues2=5×1 struct array with fields:
c
m
Now, instead of sampling (m,c) pairs, let m and c vary independently. Sample at five values of m and three values of c.
[B3,SampleValues3] = usample(A,"m",5,"c",3); B3
5x3 array of uncertain continuous-time state-space models. Each model has 1 outputs, 1 inputs, 2 states, and the following uncertain blocks: k: Uncertain real, nominal = 2, variability = [-30,30]%, 1 occurrences Model Properties Type "B3.NominalValue" to see the nominal value and "B3.Uncertainty" to interact with the uncertain elements.
This time, usample creates a grid of values (mi,cj), the five random m values paired with each of the three random c values. Therefore, B3 is a 5-by-3 array of models. Each entry SampleValues3(i,j) in the structure array contains the corresponding values (mi,cj).
SampleValues3
SampleValues3=5×3 struct array with fields:
c
m
Examine the sample values to see the independent variation of m and c. For instance, SampleValues3(1,1) and SampleValues3(1,3) have the same m but different c, while SampleValues3(1,3) and SampleValues3(2,3) have the same c but different m.
SampleValues3(1,1)
ans = struct with fields:
c: 1.0623
m: 2.1405
SampleValues3(1,3)
ans = struct with fields:
c: 1.1397
m: 2.1405
SampleValues3(2,3)
ans = struct with fields:
c: 1.1397
m: 2.8122
Finally, if you sample all three uncertain parameters, the result is an array of numeric (non-uncertain) state-space models. For instance, sample at a three-dimensional grid of five m values, three c values, and two k values.
[B4,SampleValues4] = usample(A,"m",5,"c",3,"k",2); size(B4)
5x3x2 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
When you sample uncertain dynamics, the result is one or more specific (not uncertain) state-space models. To ensure that sample dynamics are relevant to your application, you might want to restrict the order and bandwidth of the samples. To limit sample bandwidth, use the wmax input argument to usample. To control the number of poles (order) of the samples, set the SampleStateDimension property of the uncertain dynamics element. To see these effects, create a ultidyn object representing SISO uncertain dynamics with a gain bound of 1.
A = ultidyn("A",[1 1]); First, restrict the pole locations in the samples using wmax. Take two sets of samples of A, using wmax = 0.01 rad/s and wmax = 100 rad/s.
N = 10; Aslow = usample(A,N,0.01); Afast = usample(A,N,100);
Examine the frequency responses of the two sample sets.
bodemag(Aslow,Afast) ylim([-50 10]) legend("Low-bandwidth samples","High-bandwidth samples")
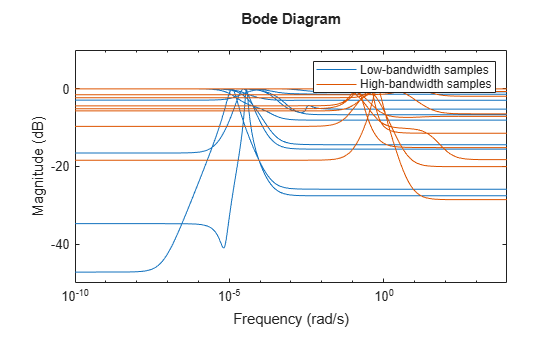
Because of the lower wmax on the samples of Aslow, dynamic features tend to occur at lower frequencies for those samples.
By default, A is configured so that samples can be up to order 3. Restrict the unmodeled dynamics to first order and take two more sets of samples.
A.SampleStateDimension = 1; A1slow = usample(A,N,0.01); A1fast = usample(A,N,100); bodemag(A1slow,A1fast) ylim([-50 10]) legend("Low-bandwidth samples","High-bandwidth samples")

Again, the samples with wmax = 0.01 have lower-frequency dynamics than those with wmax = 100, but all the samples are first-order systems. For instance, examine one of the samples to confirm that it has one state.
size(A1slow(:,:,1))
State-space model with 1 outputs, 1 inputs, and 1 states.